

Quelle est la meilleure solution ? Le viDoc RTK ou le P1
Les nouvelles avancées en matière de photogrammétrie et de technologie LiDAR apportent de nouveaux flux de travail et de nouvelles fonctionnalités pour reconstruire la réalité en 3D. Si l'essor des nouveaux smartphones dotés de capteurs LiDAR constitue une évolution passionnante pour les levés terrestres, le ciel se libère grâce à de nouveaux matériels spécialisés, des drones 4G aux caméras puissantes. Le P1 est un appareil photo de 45 Mpx utilisé par certains photogrammétristes professionnels effectuant des levés avec des drones.
Pour les grands projets d'arpentage typiques, un drone est la meilleure solution. Toutefois, pour un site unique nécessitant un relevé détaillé, le viDoc peut-il concurrencer un relevé aérien par drone ?

NaviGate est une société professionnelle de topographie et de SIG basée en Pologne qui fournit des drones et des logiciels de cartographie par drone. Leur travail de distribution de logiciels et de matériel d'arpentage spécialisés signifie qu'ils sont experts dans la création et la fourniture de modèles 3D précis, prêts à être utilisés dans la construction, l'arpentage, etc. Ils ont testé plusieurs outils différents pour créer leur propre référence quant à la précision de la technologie. L'équipe de NaviGate est partie à la recherche d'un bunker en béton construit pendant la Première Guerre mondiale et partiellement démoli. Ils voulaient créer des modèles 3D du site avec plusieurs outils afin de comparer les flux de travail et la précision. Ils ont notamment comparé la caméra Zenmuse P1 montée sur un DJI Matrice 300 RTK avec le rover viDoc RTK.
- Détails du projet
- Variations des flux de travaux de topographie pour les modèles 3D
- Vol d'un drone pour créer un modèle 3D
- Scan terrestre 3D complet avec précision RTK
- Traitement sur ordinateur ou dans les nuages pour la photogrammétrie
- Les résultats de l'utilisation du P1 par rapport au rover RTK viDoc
- Choix entre la photogrammétrie aérienne et terrestre
Détails du projet
| Utilisateur | NaviGate |
| Localisation | Pologne |
| Collecte de données | PIX4DcatchiPhone 12 ProXiaomi 11 Lite |
| Matériel aérien | DJI Zenmuse P1 |
| Logiciel de traitement des données | PIX4Dmapper PIX4Dcloud |
| Matériel RTK/GNSS | viDoc RTK rover Spectra Focus 35, Spectra Precision SP85 |
Variations des flux de travail de levés pour les modèles 3D
La structure étudiée est une ancienne poudrière située sur la colline Swarog dans la région de Cracovie. La structure a été construite et endommagée pendant la première guerre mondiale dans une zone en pente avec un gradient allant de 5 à 7% dans le terrain environnant. Il s'agit d'un bâtiment d'un étage dont la structure comporte du plâtre et des blocs d'argile. L'équipe NaviGate a entrepris de collecter des données avec un DJI Matrice 300 RTK (et P1 monté), ainsi qu'avec le viDoc RTK rover fixé à un iPhone 12 Pro. Les ensembles de données RTK seraient comparés à un ensemble de données provenant du XIAOMI 11 Lite afin de comparer la précision avec un flux de travail non RTK.

Pour être sûre de la précision des résultats, l'équipe NaviGate a d'abord dû rassembler un ensemble de données de base qu'elle utiliserait comme référence. Elle a recueilli des mesures au sol à l'aide d'un récepteur GNSS (Spectra Precision SP85). Celui-ci a été utilisé pour recueillir des données de géolocalisation et a reçu des corrections du service NTRIP utilisé sur place. L'équipe a également mesuré les coordonnées de 15 points précis avec une station totale Focus 35. Les coordonnées de ces points seront comparées aux résultats générés par le drone et aux jeux de données P1 et viDoc afin de tester leur précision.
Faire voler un drone pour créer un modèle 3D
La caméra Zenmuse P1 est généralement montée sur un DJI Matrice 300 RTK. Ce matériel peut être utilisé pour des relevés aériens dans des secteurs tels que la construction (par exemple, suivi de l'avancement des travaux ou mesure des stocks avec des drones) ou pour des relevés de terrain. Le drone a survolé une zone de 1,5 hectares avec le mode de capture oblique intelligent. Le drone a volé à une hauteur de 80 mètres et a recueilli des images avec une précision RTK. Les photos des capteurs ont été transférées via la carte SD vers un ordinateur. L'équipe a eu de la chance et a bénéficié de conditions de vol optimales avec une couverture nuageuse modérée et une température douce de 15 degrés Celsius (59 degrés Fahrenheit). Le résultat final comprend 110 images RVB exportées sous forme de fichiers .tiff. Ces données ont été traitées avec PIX4Dcloud, le logiciel de photogrammétrie en ligne.
Scan terrestre 3D complet avec précision RTK
Le viDoc RTK rover est un appareil portatif qui se fixe sur certains appareils iOS et Android. Pendant la collecte de données avec l'application gratuite de numérisation du sol PIX4Dcatch, le viDoc marque les images avec des données RTK via les réseaux NTRIP locaux. Par conséquent, les données collectées avec le viDoc et PIX4Dcatch comprennent des photos très détaillées qui sont marquées avec des données RTK pour garantir une précision centimétrique. Avec certains appareils iOS, ce flux de travail comprend également des données LiDAR qui peuvent être traitées avec le logiciel Pix4D (PIX4Dmatic offre même la possibilité de fusionner les données LiDAR iOS et la photogrammétrie dans le même nuage de points).
Pour cet exemple, NaviGate a utilisé un iPhone 12 Pro, qui possède un capteur LiDAR intégré. Un géomètre tenant le viDoc a fait le tour du site dans le sens des aiguilles d'une montre, à une vitesse moyenne de 2 kilomètres par heure. Il a scanné l'extérieur de la structure avant de scanner également le plafond en quatre lignes allant d'est en ouest. PIX4Dcatch est doté d'un système intégré de retour d'information en direct qui crée un modèle 3D au fur et à mesure que l'utilisateur se promène sur le site. Ce système lui montre l'achèvement de son modèle 3D, ce qui garantit qu'il n'y aura pas de lacunes dans l'ensemble de données final. La distance entre l'appareil mobile et un objet était en moyenne de 3,5 mètres. Ils ont recueilli un total de 654 photos géolocalisées. Grâce à l'intégration native avec le flux de travail Pix4D, les photos ont été automatiquement téléchargées sur PIX4Dcloud où le traitement a commencé. L'équipe de NaviGate a reçu une notification par courriel contenant un lien vers le projet sur PIX4Dcloud lorsque le traitement était terminé.
Pour comparer les résultats, le XIAOMI 11 a également été utilisé pour effectuer un balayage terrestre dans le même style. Les données ont été recueillies avec PIX4Dcatch, mais l'appareil n'était pas relié à un viDoc, ce qui signifie que les données RTK n'étaient pas recueillies également.
Traitement sur ordinateur ou dans les nuages pour la photogrammétrie
Il existe plusieurs options pour traiter les jeux de données de photogrammétrie capturés avec des drones ou des appareils mobiles. Ils peuvent être réalisés automatiquement via un produit en nuage tel que PIX4Dcloud. L'application cloud est exécutée par les serveurs des fournisseurs Pix4D et ne nécessite donc pas de matériel de traitement puissant de la part de l'utilisateur.
Toutefois, si l'utilisateur souhaite avoir plus de contrôle sur les paramètres pendant le traitement ou s'il doit maintenir une chaîne de possession sécurisée sur les données, comme c'est le cas pour les agents de la sécurité publique qui recréent des scènes de crime ou des accidents, un logiciel de cartographie de bureau est une meilleure option.
Dans ce projet, NaviGate a utilisé un ordinateur portable Dell Vostro P71F pour traiter les données capturées par la caméra P1. Ils ont traité leurs données viDoc avec PIX4Dcloud et PIX4Dmapper, tandis que les données des drones ont été traitées sur PIX4Dmapper.
Les résultats de l'utilisation de la caméra P1 comparés à ceux du rover RTK viDoc
Une fois le traitement terminé, l'équipe NaviGate a commencé à comparer les résultats, notamment le niveau de détail.
Pour la distance d'échantillonnage au sol (la GSD, qui est la distance réelle que représente l'espace entre deux pixels), le jeu de données P1 a donné un résultat de 0,91 cm. La précision a été obtenue en utilisant des points de contrôle définis avec la station totale (mesures prises avec le Focus 35). Les modèles 3D réalisés avec le viDoc + iPhone et le XIAOMI présentaient un écart-type de 0,2 cm. Ce résultat est logique car les appareils mobiles étaient beaucoup plus proches des objets cibles, et une valeur GSD plus petite signifie qu'il y a plus de détails. Le GSD du P1 est remarquablement précis pour un drone volant à une altitude de 80 m, mais il reste inférieur à celui des scanners terrestres dans cet exemple.
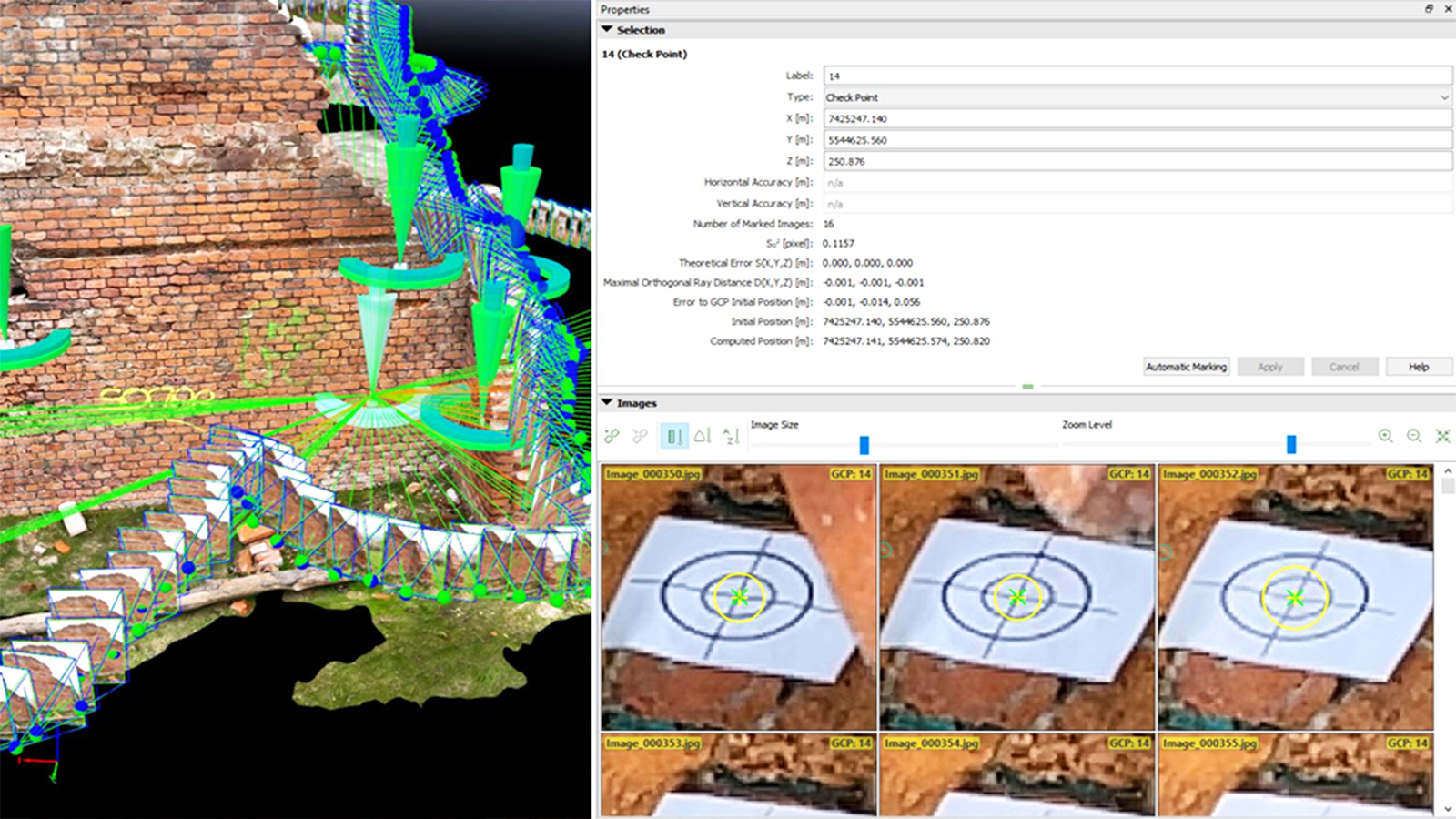
L'équipe NaviGate avait défini 15 cibles dans chaque ensemble de données pour les comparer aux données GNSS recueillies par la station totale. Ces 15 cibles ont été comparées et des différences mineures ont été constatées entre les coordonnées mesurées avec la station totale Focus 35 et les flux de travail drone/mobile.
L'erreur quadratique RMSE pour les mesures effectuées par le drone et le viDoc était de plus ou moins 2 cm sur les axes X, Y et Z. Cela signifie que les mesures effectuées sur la base de ces deux méthodes sont correctes. Cela signifie que les mesures effectuées sur la base de ces ensembles de données sont conformes à la norme du groupe 1 requise par la loi polonaise. Pour référence, le Bureau Veritas a certifié le viDoc RTK rover pour des mesures de classe A (précision de 5 cenitmètres).
Le Xiaomi, sans RTK, avait une précision de 5 centimètres lors de la mesure d'objets situés à 2 mètres. Cette imprécision pourrait être éliminée ou atténuée par l'utilisation de GCP ou de points de contrôle spécifiques. Ces résultats ont mis en évidence la simplicité du flux de travail du viDoc, qui était plus précis et ne nécessitait pas d'étapes supplémentaires pour garantir cette précision, contrairement aux BPC dont le Xiamoi avait besoin.
Choisir entre la photogrammétrie aérienne et terrestre
L'équipe de NaviGate a constaté qu'elle disposait de niveaux de détail élevés pour les deux formes de photogrammétrie. L'imagerie aérienne et les données provenant de la caméra P1 et du drone ont permis d'obtenir un GSD précis malgré l'altitude de vol élevée. Cependant, comme il s'agissait de l'étude d'un bâtiment individuel d'un seul étage, le flux de travail RTK de viDoc serait probablement un meilleur choix pour des projets similaires. Pour des études à plus grande échelle, la cartographie aérienne avec un drone serait un choix moins exigeant en termes de main-d'œuvre.

Les avantages uniques du viDoc proviennent de son utilité et de sa polyvalence. Il s'agit d'un outil très adaptable, léger et portable, facile à transporter sur un site et à utiliser.
"Par rapport aux méthodes d'arpentage traditionnelles, tirer parti d'un appareil aussi polyvalent offre de grandes possibilités", explique Grzegorz Durlo, de NaviGate.
"La valeur de cet équipement sera appréciée par les chercheurs et les archéologues lors des fouilles et de la reconstruction de parties d'objets caractérisés par une grande importance pour l'histoire et la culture."
Récemment, le LiDAR sur les appareils mobiles a été utilisé par des clients de NaviGate pour des travaux comprenant des mesures de volume pour la foresterie ou la mesure de volumes. Grâce à la précision du viDoc, ces mesures de volume peuvent être utilisées pour des chantiers de construction ou des travaux d'arpentage terrestre.


