

Qual è il migliore? Il viDoc o il P1 e il DJI Matrice 300
I nuovi progressi nella fotogrammetria e nella tecnologia LiDAR stanno portando nuovi flussi di lavoro e funzionalità per ricostruire la realtà in 3D. Mentre l'ascesa dei nuovi smartphone con sensori LiDAR rappresenta uno sviluppo entusiasmante per il rilievo terrestre, il cielo si sta aprendo con nuovi hardware specializzati, dai droni 4G alle potenti fotocamere. Il P1 è una fotocamera da 45MP utilizzata da alcuni fotogrammetristi professionisti che completano i rilievi con i droni.
Per i tipici progetti di rilievo di grandi dimensioni, un drone è la soluzione migliore. Tuttavia, quando si tratta di un singolo sito che necessita di un rilievo dettagliato, il viDoc può competere con un rilievo aereo con drone?

NaviGate è un'azienda di rilevamento professionale e GIS con sede in Polonia che fornisce droni e software di mappatura per droni. Grazie al loro lavoro di distribuzione di software e hardware specializzati per il rilievo, sono esperti nella creazione e nella fornitura di modelli 3D accurati, pronti per l'uso nell'edilizia, nel rilievo e altro ancora. Hanno testato diversi strumenti per creare un proprio riferimento sull'accuratezza della tecnologia. Il team di NaviGate è partito alla ricerca di un bunker in cemento armato costruito durante la Prima Guerra Mondiale e in parte demolito. Volevano creare modelli 3D del sito con diversi strumenti per confrontare i flussi di lavoro e la precisione. Questo includeva il confronto tra la fotocamera Zenmuse P1 montata su un DJI Matrice 300 RTK e il rover viDoc RTK.
- Dettagli del progetto
- Variazioni dei flussi di lavoro di rilievo per i modelli 3D
- Volare con un drone per creare un modello 3D
- Scansione terrestre 3D completa con precisione RTK
- Elaborazione desktop vs. cloud per la fotogrammetria
- I risultati dell'utilizzo del P1 rispetto al rover RTK viDoc La
- scelta tra fotogrammetria aerea e terrestre
Dettagli del progetto
| Utente | NaviGate |
| Località | Polonia |
| Raccolta dati | PIX4DcatchiPhone 12 ProXiaomi 11 Lite |
| Hardware aereo | DJI Zenmuse P1 |
| Software di elaborazione | PIX4Dmapper PIX4Dcloud |
| Hardware RTK/GNSS | viDoc RTK roverSpectra Focus 35 Spectra Precision SP85 |
Variazioni dei flussi di lavoro di rilievo per i modelli 3D
La struttura oggetto del rilievo è una vecchia polveriera sulla collina di Swarog, nella regione di Cracovia. La struttura è stata costruita e danneggiata durante la Prima Guerra Mondiale in un'area in pendenza con una pendenza che va dal 5 al 7% nel terreno circostante. Si tratta di un edificio a un piano con alcuni blocchi di intonaco e argilla nella struttura. Il team di NaviGate ha deciso di raccogliere dati con un DJI Matrice 300 RTK (e P1 montato) e con il rover viDoc RTK collegato a un iPhone 12 Pro. I set di dati RTK sarebbero stati confrontati con un set di dati dello XIAOMI 11 Lite per confrontare la precisione con un flusso di lavoro non RTK.

Per essere sicuri dell'accuratezza dei risultati, il team di NaviGate ha dovuto innanzitutto raccogliere un set di dati di base da utilizzare come riferimento. Hanno raccolto misurazioni a terra con un ricevitore GNSS (Spectra Precision SP85). Questo è stato utilizzato per raccogliere dati di geolocalizzazione e ha ricevuto correzioni dal servizio NTRIP utilizzato in loco. Il team ha inoltre misurato le coordinate di 15 punti precisi con una stazione totale Focus 35. Le coordinate di questi punti sarebbero state confrontate con quelle di altri punti. Le coordinate di questi punti sono state confrontate con i risultati generati dal drone e con il set di dati P1 e viDoc per verificarne l'accuratezza.
Volare con un drone per creare un modello 3D
La telecamera Zenmuse P1 è tipicamente montata su un DJI Matrice 300 RTK. Questo hardware può essere utilizzato per rilievi aerei in settori come l'edilizia (ad esempio, per tracciare i progressi o misurare le scorte con i droni) o per rilievi del territorio e del terreno. Il drone ha sorvolato un'area di 1,5 ettari con la modalità di acquisizione obliqua intelligente. Il drone ha volato a un'altezza di 80 metri e ha raccolto immagini con precisione RTK. Le foto dei sensori sono state trasferite tramite la scheda SD a un computer. Il team è stato fortunato e ha avuto condizioni di volo ottimali con una moderata copertura nuvolosa e una temperatura mite di 15 gradi Celsius (59 gradi Fahrenheit). I risultati finali comprendono 110 immagini RGB esportate come file .tiff. I dati sono stati elaborati con PIX4Dcloud, il software di fotogrammetria online.
Scansione terrestre 3D completa con precisione RTK
Il rover RTK viDoc è un dispositivo portatile che si collega a dispositivi iOS e Android selezionati. Durante la raccolta dei dati con l'applicazione gratuita di scansione del terreno PIX4Dcatch, il viDoc etichetta le immagini con i dati RTK tramite le reti NTRIP locali. Di conseguenza, i dati raccolti con il viDoc e PIX4Dcatch includono foto altamente dettagliate che sono etichettate con dati RTK per garantire una precisione centimetrica. Con dispositivi iOS selezionati, questo flusso di lavoro include anche dati LiDAR che possono essere elaborati con il software Pix4D (PIX4Dmatic offre persino l'opzione di unire i dati LiDAR di iOS e la fotogrammetria nella stessa nuvola di punti).

Per questo esempio, NaviGate ha utilizzato un iPhone 12 Pro, dotato di un sensore LiDAR integrato. Un rilevatore con in mano il viDoc ha camminato intorno al sito in senso orario, con una media di 2 chilometri all'ora. Hanno scansionato l'esterno della struttura prima di scansionare anche il soffitto in quattro linee che si muovono da est a ovest. PIX4Dcatch è dotato di un feedback in tempo reale che crea un modello 3D mentre l'utente cammina intorno al sito, mostrando il completamento del modello 3D e assicurando che non ci siano lacune nel set di dati finale. La distanza tra il dispositivo mobile e l'oggetto era in media di 3,5 metri. Hanno raccolto un totale di 654 foto geotaggate. Grazie all'integrazione nativa con il flusso di lavoro di Pix4D, le foto sono state caricate automaticamente su PIX4Dcloud, dove è iniziata l'elaborazione. Il team di NaviGate ha ricevuto una notifica via e-mail con un link al progetto su PIX4Dcloud al termine dell'elaborazione.
Per confrontare i risultati, è stato utilizzato anche lo XIAOMI 11 per completare una scansione terrestre nello stesso stile. I dati sono stati raccolti con PIX4Dcatch, ma il dispositivo non era collegato a un viDoc, il che significa che non sono stati raccolti anche i dati RTK.
Elaborazione desktop vs. cloud per la fotogrammetria
Esistono diverse opzioni per l'elaborazione dei set di dati fotogrammetrici acquisiti con droni o dispositivi mobili. L'elaborazione può avvenire automaticamente tramite un prodotto cloud come PIX4Dcloud. L'applicazione cloud viene eseguita dai server dei fornitori di Pix4D e non richiede quindi un potente hardware di elaborazione da parte dell'utente.
Tuttavia, se l'utente desidera avere un maggiore controllo sulle impostazioni durante l'elaborazione o ha bisogno di mantenere una catena di custodia sicura sui dati, come nel caso degli operatori di pubblica sicurezza che ricreano scene del crimine o incidenti, allora un software di mappatura desktop è un'opzione migliore.
In questo progetto, NaviGate ha utilizzato un laptop Dell Vostro P71F per elaborare i dati acquisiti con la telecamera P1. I dati viDoc sono stati elaborati con PIX4Dcloud e PIX4Dmapper, mentre i dati del drone sono stati elaborati con PIX4Dmapper.
I risultati dell'utilizzo del P1 rispetto al rover viDoc RTK
Una volta completata l'elaborazione, il team di NaviGate ha iniziato a confrontare i risultati, compreso il livello di dettaglio.
Per quanto riguarda la distanza di campionamento del terreno (GSD, ovvero la distanza che rappresenta nella realtà lo spazio tra due pixel), il set di dati del P1 ha fornito un risultato di 0,91 cm. L'accuratezza è stata resa utilizzando i punti di controllo impostati con la stazione totale (misurazioni effettuate con il Focus 35). I modelli 3D realizzati con viDoc + iPhone e XIAOMI avevano una GSD di 0,2 cm. Ciò ha senso in quanto i dispositivi mobili erano molto più vicini agli oggetti di destinazione e un valore GSD più piccolo significa che i dettagli sono maggiori. Il GSD del P1 è straordinariamente preciso per un drone che vola a un'altitudine di 80 m, ma in questo esempio è ancora inferiore a quello degli scanner terrestri.
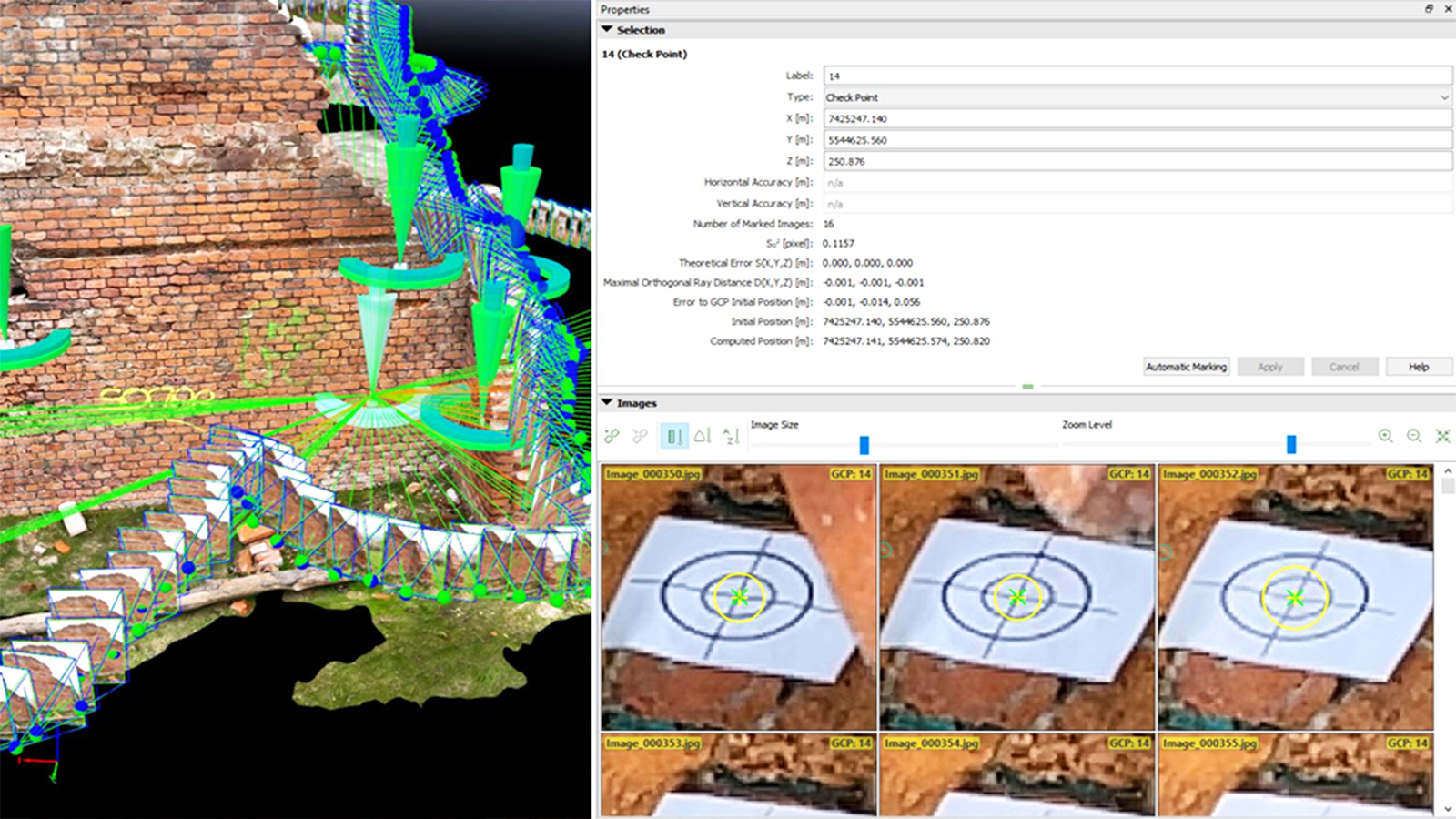
Il team di NaviGate ha impostato 15 obiettivi da ciascun set di dati da confrontare con i dati GNSS raccolti con la stazione totale. Tutti e 15 i target sono stati confrontati e sono state riscontrate differenze minime tra le coordinate misurate con la stazione totale Focus 35 e i flussi di lavoro del drone/mobile.
L'errore quadratico RMSE per le misurazioni effettuate con il drone e con viDoc è stato di più/meno 2 cm negli assi X, Y e Z. Ciò significa che le misurazioni effettuate sulla base di questi set di dati soddisfano lo standard del Gruppo 1 richiesto dalla legge polacca. Come riferimento, il Bureau Veritas ha certificato il rover RTK viDoc per le misurazioni di Classe A (precisione entro 5 cenitmetri).
Lo Xiaomi, senza RTK, aveva una precisione di 5 centimetri quando misurava oggetti a 2 metri di distanza. Questa imprecisione potrebbe essere eliminata o attenuata con l'uso di GCP o punti di controllo specifici. Questi risultati hanno evidenziato la semplicità del flusso di lavoro del viDoc, che è più preciso e non richiede ulteriori passaggi per garantire tale precisione, a differenza dei GCP di cui avrebbe bisogno lo Xiamoi.
Scelta tra fotogrammetria aerea e terrestre
Il team di NaviGate si è reso conto di avere a disposizione alti livelli di dettaglio per entrambe le forme di fotogrammetria. Le immagini aeree e i dati della fotocamera P1 e del drone hanno prodotto un GSD accurato nonostante l'elevata altitudine di volo. Tuttavia, trattandosi di un rilievo di un singolo edificio a un piano, il flusso di lavoro viDoc RTK sarebbe probabilmente una scelta migliore per progetti simili. Per rilievi su scala più ampia, la mappatura aerea con un drone sarebbe una scelta meno impegnativa.

I vantaggi unici di viDoc derivano dalla sua utilità e versatilità. È uno strumento altamente adattabile, leggero e portatile, facile da trasportare in un sito e da utilizzare.
"Rispetto ai metodi di rilievo tradizionali, sfruttare un dispositivo così versatile offre grandi opportunità", spiega Grzegorz Durlo, di NaviGate.
"Il valore dell'apparecchiatura sarà apprezzato da ricercatori e archeologi durante gli scavi e la ricostruzione di parti di oggetti caratterizzati da un'elevata importanza storica e culturale."
Recentemente, il LiDAR su dispositivi mobili è stato utilizzato da clienti di NaviGate per lavori che includono misurazioni di volumi per la silvicoltura o la misurazione di volumi. Grazie alla precisione del viDoc, queste misure di volume possono essere utilizzate per i cantieri edili o per i lavori di rilievo terrestre.


