

Was ist am besten? Die viDoc RTK oder die P1 und Matrice 300
Neue Fortschritte in der Photogrammetrie und LiDAR-Technologie ermöglichen neue Arbeitsabläufe und Funktionen zur Rekonstruktion der Realität in 3D. Während das Aufkommen neuer Smartphones mit LiDAR-Sensoren eine aufregende Entwicklung für die terrestrische Vermessung darstellt, wird der Himmel mit neuer, spezialisierter Hardware von 4G-Drohnen bis zu leistungsstarken Kameras erschlossen. Die P1 ist eine 45MP-Kamera, die von einigen professionellen Photogrammetrikern bei Vermessungen mit Drohnen eingesetzt wird.
Für typische große Vermessungsprojekte ist eine Drohne die bessere Lösung. Aber kann viDoc mit einer Drohnenvermessung konkurrieren, wenn es nur um einen einzelnen Standort geht, der detailliert vermessen werden soll?

NaviGate ist ein professionelles Vermessungs- und GIS-Unternehmen mit Sitz in Polen, das Drohnen und Drohnenkartierungssoftware anbietet. Durch den Vertrieb von spezialisierter Vermessungssoftware und -hardware sind sie Experten für die Erstellung und Bereitstellung präziser 3D-Modelle, die im Baugewerbe, in der Vermessung und in anderen Bereichen eingesetzt werden können. Sie haben verschiedene Tools getestet, um ihre eigene Referenz für die Genauigkeit der Technologie zu erstellen. Das Team von NaviGate machte sich auf den Weg zu einem Betonbunker aus dem Ersten Weltkrieg, der teilweise abgerissen wurde. Sie wollten 3D-Modelle des Geländes mit verschiedenen Tools erstellen, um die Arbeitsabläufe und die Genauigkeit zu vergleichen. Dazu gehörte der Vergleich der Zenmuse P1-Kamera, die auf einer DJI Matrice 300 RTK montiert war, mit dem viDoc RTK-Rover.
- Details zum Projekt
- Variationen von Vermessungsabläufen für 3D-Modelle
- Fliegen einer Drohne zur Erstellung eines 3D-Modells
- Vollständiger 3D-Terrestrialscan mit RTK-Genauigkeit
- Desktop vs. Cloud-Verarbeitung für Photogrammetrie
- Die Ergebnisse der Verwendung des P1 im Vergleich zum viDoc RTK-Rover Die
- Wahl zwischen Luft- und terrestrischer Photogrammetrie
Projektdetails
| Benutzer | NaviGate |
| Standort | Polen |
| Datenerfassung | PIX4Dcatch iPhone 12 ProXiaomi 11 Lite |
| Luftaufnahmen-Hardware | DJI Zenmuse P1 |
| Verarbeitungssoftware | PIX4Dmapper PIX4Dcloud |
| RTK/GNSS-Hardware | viDoc RTK roverSpectra Focus 35 Spectra Precision SP85 |
Varianten von Vermessungsworkflows für 3D-Modelle
Bei dem zu vermessenden Bauwerk handelt es sich um ein altes Pulverhaus auf dem Swarog-Hügel in der Region Krakau. Das im Ersten Weltkrieg errichtete und beschädigte Bauwerk befindet sich in einer Hanglage mit einem Gefälle von 5 bis 7 % im umliegenden Gelände. Es handelt sich um ein einstöckiges Gebäude mit einigen Putz- und Lehmziegeln in der Struktur. Das NaviGate-Team wollte Daten mit einer DJI Matrice 300 RTK (mit montiertem P1) sowie mit dem viDoc RTK-Rover, der an einem iPhone 12 Pro befestigt ist, sammeln. Die RTK-Datensätze sollten mit einem Datensatz aus dem XIAOMI 11 Lite verglichen werden, um die Genauigkeit mit einem Nicht-RTK-Workflow zu vergleichen.

Um sich der Genauigkeit der Ergebnisse sicher sein zu können, musste das NaviGate-Team zunächst einen Basisdatensatz sammeln, der als Referenz dienen sollte. Sie sammelten bodengestützte Messungen mit einem GNSS-Empfänger (Spectra Precision SP85). Dieser wurde zur Erfassung von Geolokalisierungsdaten verwendet und erhielt Korrekturen vom vor Ort genutzten NTRIP-Dienst. Außerdem maß das Team die Koordinaten von 15 genauen Punkten mit einer Focus 35-Totalstation. Die Koordinaten dieser Punkte wurden mit den von der Drohne und dem P1-Datensatz sowie dem viDoc-Datensatz generierten Ergebnissen verglichen, um ihre Genauigkeit zu prüfen.
Fliegen einer Drohne zur Erstellung eines 3D-Modells
Die Zenmuse P1 Kamera ist normalerweise auf einer DJI Matrice 300 RTK montiert. Diese Hardware kann für Vermessungen aus der Luft in Branchen wie dem Baugewerbe (z. B. Verfolgung des Baufortschritts oder Vermessung von Lagerbeständen mit Drohnen) oder für Land- und Geländevermessungen verwendet werden. Die Drohne überflog eine Fläche von 1,5 Hektar mit dem intelligenten Schräglagenerfassungsmodus. Die Drohne flog in einer Höhe von 80 Metern und sammelte Bilder mit RTK-Genauigkeit. Die Fotos von den Sensoren wurden über die SD-Karte auf einen Computer übertragen. Das Team hatte Glück, denn es herrschten optimale Flugbedingungen mit mäßiger Bewölkung und einer milden Temperatur von 15 Grad Celsius (59 Grad Fahrenheit). Das Endergebnis umfasste 110 RGB-Bilder, die als .tiff-Dateien exportiert wurden. Diese Daten wurden mit PIX4Dcloud, der Online-Photogrammetrie-Software, verarbeitet.
Vollständiger 3D-Terrestrialscan mit RTK-Genauigkeit
Der viDoc RTK-Rover ist ein Handheld-Gerät, das an ausgewählte iOS- und Android-Geräte angeschlossen werden kann. Während der Datenerfassung mit der kostenlosen Bodenscan-App PIX4Dcatch versieht der viDoc die Bilder mit RTK-Daten über lokale NTRIP-Netzwerke. Die mit viDoc und PIX4Dcatch erfassten Daten enthalten daher hochdetaillierte Fotos, die mit RTK-Daten versehen sind, um Zentimetergenauigkeit zu gewährleisten. Bei ausgewählten iOS-Geräten umfasst dieser Workflow auch LiDAR-Daten, die mit der Pix4D-Software verarbeitet werden können (PIX4Dmatic bietet sogar die Option, iOS-LiDAR-Daten und Photogrammetrie in derselben Punktwolke zusammenzuführen).

Für dieses Beispiel verwendete NaviGate ein iPhone 12 Pro, das über einen eingebauten LiDAR-Sensor verfügt. Ein Vermessungsingenieur ging mit dem viDoc im Uhrzeigersinn um die Baustelle herum, mit einer durchschnittlichen Geschwindigkeit von 2 Kilometern pro Stunde. Dabei wurde die Außenseite des Gebäudes gescannt, bevor auch die Decke in vier Linien von Osten nach Westen abgetastet wurde. PIX4Dcatch verfügt über ein integriertes Live-Feedback, das ein 3D-Modell erstellt, während der Benutzer um den Ort herumläuft, und ihm die Fertigstellung seines 3D-Modells anzeigt, um sicherzustellen, dass der endgültige Datensatz keine Lücken aufweist. Die Entfernung zwischen dem mobilen Gerät und einem Objekt betrug durchschnittlich 3,5 Meter. Es wurden insgesamt 654 Fotos mit Geotags erfasst. Dank der nativen Integration in den Pix4D-Workflow wurden die Fotos automatisch in die PIX4Dcloud hochgeladen, wo die Verarbeitung begann. Das NaviGate-Team erhielt eine E-Mail-Benachrichtigung mit einem Link zum Projekt auf PIX4Dcloud, sobald die Verarbeitung abgeschlossen war.
Um die Ergebnisse zu vergleichen, wurde das XIAOMI 11 auch für einen terrestrischen Scan im gleichen Stil verwendet. Die Daten wurden mit PIX4Dcatch erfasst, aber das Gerät war nicht mit einem viDoc verbunden, was bedeutet, dass auch keine RTK-Daten erfasst wurden.
Desktop vs. Cloud-Verarbeitung für Photogrammetrie
Es gibt mehrere Optionen für die Verarbeitung von Photogrammetrie-Datensätzen, die mit Drohnen oder mobilen Geräten erfasst wurden. Sie können automatisch über ein Cloud-Produkt wie PIX4Dcloud erfolgen. Die Cloud-App wird von den Servern der Pix4D-Anbieter betrieben und erfordert daher keine leistungsstarke Verarbeitungshardware auf Seiten des Nutzers.
Wenn ein Nutzer jedoch mehr Kontrolle über die Einstellungen während der Verarbeitung haben möchte oder eine sichere Verwahrkette für die Daten auf dem Desktop aufrechterhalten muss, wie es bei Mitarbeitern der öffentlichen Sicherheit der Fall ist, die Tatorte oder Unfälle nachstellen, dann ist eine Desktop-Mapping-Software die bessere Option.
In diesem Projekt verwendete NaviGate einen Dell Vostro P71F Laptop, um die mit der P1-Kamera aufgenommenen Daten zu verarbeiten. Sie verarbeiteten ihre viDoc-Daten mit PIX4Dcloud und PIX4Dmapper, während die Drohnendaten mit PIX4Dmapper verarbeitet wurden.
Die Ergebnisse der Verwendung des P1 im Vergleich zum viDoc RTK-Rover
Sobald die Verarbeitung abgeschlossen war, begann das NaviGate-Team mit dem Vergleich der Ergebnisse, einschließlich des Detailgrads.
Für den Bodenabtastungsabstand (GSD, der angibt, wie groß der Abstand zwischen zwei Pixeln in der Realität ist) lieferte der P1-Datensatz ein Ergebnis von 0,91 cm. Die Genauigkeit wurde anhand von Kontrollpunkten ermittelt, die mit der Totalstation gesetzt wurden (Messungen mit dem Focus 35). Die mit viDoc + iPhone und XIAOMI erstellten 3D-Modelle hatten eine GSD von 0,2 cm. Dies ist sinnvoll, da die mobilen Geräte viel näher an den Zielobjekten waren und ein kleinerer GSD-Wert bedeutet, dass mehr Details vorhanden sind. Die GSD des P1 ist für eine Drohne, die in einer Höhe von 80 m fliegt, bemerkenswert genau, liegt aber immer noch unter der von terrestrischen Scannern in diesem Beispiel.
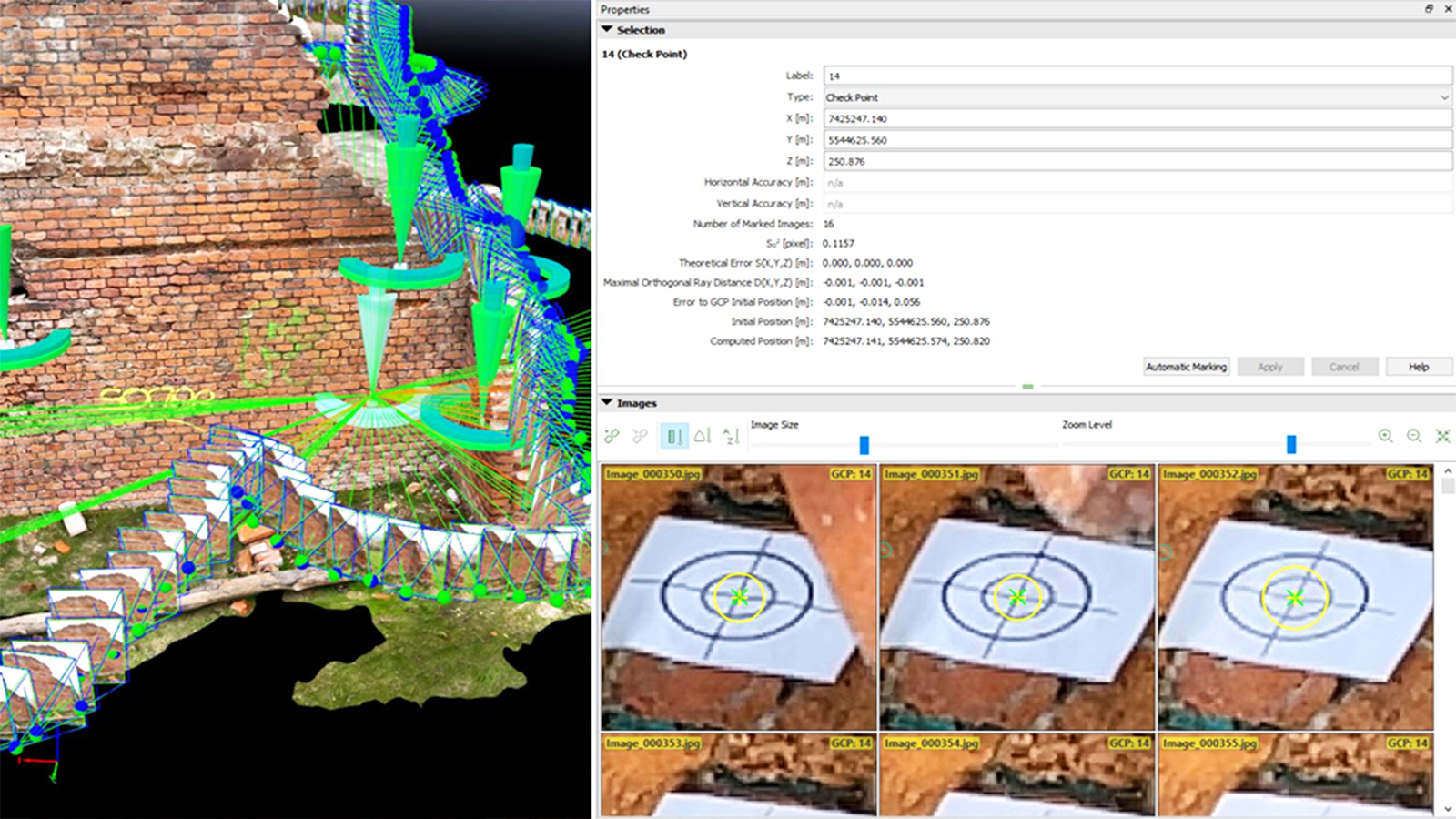
Das NaviGate-Team hatte 15 Ziele aus jedem Datensatz zum Vergleich mit den mit der Totalstation erfassten GNSS-Daten festgelegt. Alle 15 Ziele wurden verglichen, und es gab nur geringe Unterschiede zwischen den mit der Focus 35-Totalstation und den Drohnen-/Mobil-Workflows gemessenen Koordinaten.
Der quadratische Fehler RMSE für die Drohnen- und viDoc-Messungen betrug plus/minus 2 cm in der X-, Y- und Z-Achse. Das bedeutet, dass die auf der Grundlage dieser Datensätze durchgeführten Messungen den in Polen gesetzlich vorgeschriebenen Standard der Gruppe 1 erfüllen. Als Referenz hat das Bureau Veritas den viDoc RTK-Rover für Messungen der Klasse A (mit einer Genauigkeit von 5 Zentimetern) zertifiziert.
Der Xiaomi ohne RTK war bei der Messung von Objekten, die 2 Meter entfernt waren, auf 5 Zentimeter genau. Diese Ungenauigkeit konnte durch die Verwendung von GCPs oder spezifischen Kontrollpunkten beseitigt oder abgeschwächt werden. Diese Ergebnisse unterstreichen den unkomplizierten Arbeitsablauf des viDoc, da er genauer ist und keine weiteren Schritte erfordert, um diese Genauigkeit sicherzustellen, im Gegensatz zu den GCPs, die der Xiamoi benötigt.
Die Wahl zwischen Luft- und Bodenphotogrammetrie
Das Team von NaviGate stellte fest, dass beide Formen der Photogrammetrie einen hohen Detailgrad aufwiesen. Die Luftbilder und die Daten der P1-Kamera und der Drohne ergaben trotz der großen Flughöhe eine genaue GSD. Da es sich jedoch um die Vermessung eines einzelnen, einstöckigen Gebäudes handelte, wäre der viDoc-RTK-Workflow für ähnliche Projekte wahrscheinlich die bessere Wahl gewesen. Für größere Vermessungen wäre die Luftbildvermessung mit einer Drohne eine weniger arbeitsintensive Wahl.

Die einzigartigen Vorteile von viDoc liegen in seiner Nützlichkeit und Vielseitigkeit. Es handelt sich um ein äußerst anpassungsfähiges, leichtes und tragbares Gerät, das sich leicht zu einer Baustelle transportieren und verwenden lässt.
Im Vergleich zu herkömmlichen Vermessungsmethoden bietet die Nutzung eines so vielseitigen Geräts große Möglichkeiten", erklärt Grzegorz Durlo von NaviGate.
"Der Wert des Geräts wird von Forschern und Archäologen bei Ausgrabungen und der Rekonstruktion von Teilen von Objekten geschätzt werden, die für die Geschichte und Kultur von großer Bedeutung sind."
In jüngster Zeit wurde LiDAR auf mobilen Geräten von Kunden von NaviGate unter anderem für Volumenmessungen in der Forstwirtschaft oder für Volumenmessungen eingesetzt. Mit der Genauigkeit des viDoc können diese Volumenmessungen für Baustellen oder terrestrische Vermessungsarbeiten verwendet werden.


