Qual é o melhor? O viDoc RTK ou o P1 e o DJI Matrice 300
Novos avanços na fotogrametria e na tecnologia LiDAR estão trazendo novos fluxos de trabalho e novas funcionalidades para reconstruir a realidade em 3D. Enquanto o surgimento de novos smartphones incluindo sensores LiDAR é um desenvolvimento empolgante para o levantamento terrestre, o céu está sendo destravado com novo hardware especializado de drones 4G para câmeras poderosas. A P1 é uma câmera de 45MP utilizada por alguns fotogrametristas profissionais que completam pesquisas com zangões.
Para grandes projetos típicos de levantamento topográfico, um zangão é o melhor caminho a seguir. Entretanto, ao olhar apenas para um único local que precisa de um levantamento detalhado, o viDoc poderia competir com um levantamento aéreo com drone?

NaviGate é uma empresa profissional de levantamento e GIS sediada na Polônia que fornece zangões e software de mapeamento de zangões. Seu trabalho na distribuição de software e hardware especializado em topografia significa que eles são especialistas em criar e fornecer modelos 3D precisos que estão prontos para uso na construção, topografia e muito mais. Eles testaram várias ferramentas diferentes para criar sua própria referência sobre a precisão da tecnologia. A equipe da NaviGate partiu para um bunker de concreto que foi construído na Primeira Guerra Mundial que foi parcialmente demolido. Eles queriam criar modelos 3D do local com várias ferramentas para comparar os fluxos de trabalho e a precisão. Isto incluía a comparação da câmera Zenmuse P1 montada em um DJI Matrice 300 RTK com o rover viDoc RTK.
- Detalhes do projeto
- Variações dos fluxos de trabalho de topografia para modelos 3D
- Voar com um zangão para criar um modelo 3D
- Varredura terrestre 3D completa com precisão RTK
- Processamento de desktop vs. nuvem para fotogrametria
- Os resultados da utilização do P1 em comparação com o viDoc RTK rover
- Escolhendo entre a fotogrametria aérea e terrestre
Detalhes do projeto
| Usuário | NaviGate |
| Localização | Polônia |
| Coleta de dados terresetoriais | PIX4Dcatch iPhone 12 Pro Xiaomi 11 Lite |
| Hardware Aéreo | DJI Zenmuse P1 |
| Software de processamento | PIX4Dmapper PIX4Dcloud |
| RTK/GNSS hardware | viDoc RTK roverSpectra Focus 35 Spectra Precision SP85 |
Variações dos fluxos de trabalho de topografia para modelos 3D
A estrutura sendo pesquisada é uma antiga casa de pó em Swarog Hill, na região de Cracóvia. A estrutura foi construída e danificada na Primeira Guerra Mundial em uma área inclinada com um declive que varia de 5 a 7% no terreno circundante. É um edifício de um andar com alguns blocos de gesso e argila em sua estrutura. A equipe NaviGate se propôs a coletar dados com um DJI Matrice 300 RTK (e P1 montado), bem como com o viDoc RTK rover acoplado a um iPhone 12 Pro. Os conjuntos de dados RTK seriam comparados com um conjunto de dados do XIAOMI 11 Lite para comparar a precisão com um fluxo de trabalho não-RTK.

Para ter certeza da exatidão dos resultados, a equipe NaviGate precisava primeiro reunir um conjunto de dados básicos que usariam como referência. Eles reuniram medições baseadas em terra com um receptor GNSS (Spectra Precision SP85). Isto foi usado para reunir dados de geolocalização e recebeu correções do serviço NTRIP utilizado no local. A equipe também mediu as coordenadas de 15 pontos precisos com uma estação total Focus 35. As coordenadas destes pontos seriam comparadas com os resultados gerados pelo conjunto de dados drone e P1 e pelo conjunto de dados viDoc para testar sua precisão.
Voando um zangão para criar um modelo 3D
A câmera Zenmuse P1 é normalmente montada em um DJI Matrice 300 RTK. Este hardware pode ser usado para levantamentos aéreos para indústrias como a construção (por exemplo, rastreamento do progresso ou medição de estoques com drones) ou levantamentos de terrenos e terrenos. O drone voou uma área de 1,5 hectares com o modo de captura oblíqua inteligente. O zangão voou a uma altura de 80 metros e reuniu imagens com precisão RTK. As fotos dos sensores foram transferidas através do cartão SD para um computador. A equipe teve sorte e teve ótimas condições de vôo com cobertura moderada de nuvens e uma temperatura suave de 15 graus Celsius (59 graus Fahrenheit). Os resultados finais incluíram 110 fotos RGB que foram exportadas como arquivos .tiff. Estes dados foram processados com o PIX4Dcloud, o software de fotogrametria online.
Digitalização completa em 3D terrestre com precisão RTK
O viDoc RTK rover é um dispositivo portátil que se prende a determinados dispositivos iOS e Android. Durante a coleta de dados com o aplicativo PIX4Dcatch, o viDoc marca imagens com dados RTK através de redes locais NTRIP. Como resultado, os dados coletados com o viDoc e o PIX4Dcatch incluem fotos altamente detalhadas que são etiquetadas com dados RTK para garantir precisão de centímetros. Com dispositivos iOS selecionados, este fluxo de trabalho também inclui dados LiDAR que podem ser processados com o software Pix4D (o PIX4Dmatic oferece até mesmo a opção de fundir dados iOS LiDAR e fotogrametria na mesma nuvem de pontos).

Para este exemplo, NaviGate usou um iPhone 12 Pro, que tem um sensor LiDAR incorporado. Um agrimensor segurando o viDoc andou pelo local em um movimento no sentido horário, com média de 2 quilômetros por hora. Eles escanearam o exterior da estrutura antes de escanear também o teto em quatro linhas movendo-se de leste para oeste. PIX4Dcatch tem feedback ao vivo incorporado que cria um modelo 3D enquanto um usuário caminha ao redor de um local que lhes mostra a conclusão de seu modelo 3D, assegurando que não haverá lacunas no conjunto de dados final. A distância do dispositivo móvel até um objeto foi em média de 3,5 metros. Eles reuniram um total de 654 fotos georreferenciadas. Graças à integração nativa com o fluxo de trabalho Pix4D, as fotos foram automaticamente carregadas na PIX4Dcloud, onde o processamento começou. A equipe NaviGate recebeu uma notificação por e-mail com um link para o projeto no PIX4Dcloud quando o processamento foi concluído.
Para comparar os resultados, o XIAOMI 11 também foi usado para completar uma varredura terrestre no mesmo estilo. Os dados foram coletados com PIX4Dcatch mas o dispositivo não foi anexado a um viDoc, o que significa que os dados RTK não estavam sendo coletados também.
Processamento de desktop vs. nuvem para fotogrametria
Há várias opções para o processamento de conjuntos de dados fotogramétricos capturados com drones ou dispositivos móveis. Eles podem ser feitos automaticamente através de um produto em nuvem, como o PIX4Dcloud. O aplicativo de nuvem é executado pelos servidores dos provedores Pix4D e, portanto, não requer um hardware de processamento poderoso por parte do usuário.
Entretanto, se um usuário deseja ter mais controle sobre as configurações durante o processamento ou precisa manter uma cadeia de custódia segura sobre os dados, como é o caso de operadores de segurança pública que estão recriando cenas de crime ou acidentes, então um software de mapeamento de desktop é uma opção melhor.
Neste projeto, NaviGate usou um laptop Dell Vostro P71F para processar os dados capturados com a câmera P1. Eles processaram seus dados viDoc com PIX4Dcloud e PIX4Dmapper, enquanto os dados do drone foram processados no PIX4Dmapper.
Os resultados da utilização do P1 em comparação com o viDoc RTK rover
Uma vez concluído o processamento, a equipe NaviGate começou a comparar os resultados, incluindo o nível de detalhes.
Para a distância de amostragem do solo (o GSD, que é quanta distância na realidade representa o espaço entre dois pixels), o conjunto de dados P1 apresentou um resultado de 0,91 cm. A precisão foi renderizada utilizando pontos de verificação definidos com a estação total (medidas tomadas com o Focus 35). Os modelos 3D feitos com o viDoc + iPhone e o XIAOMI tinham um GSD de 0,2cm. Isto faz sentido, pois os dispositivos móveis estavam muito mais próximos dos objetos-alvo, e um valor menor de GSD significa que há mais detalhes. O GSD do P1 é notavelmente preciso para um drone voando a uma altitude de 80 m, mas ainda é menor do que os scanners terrestres neste exemplo.
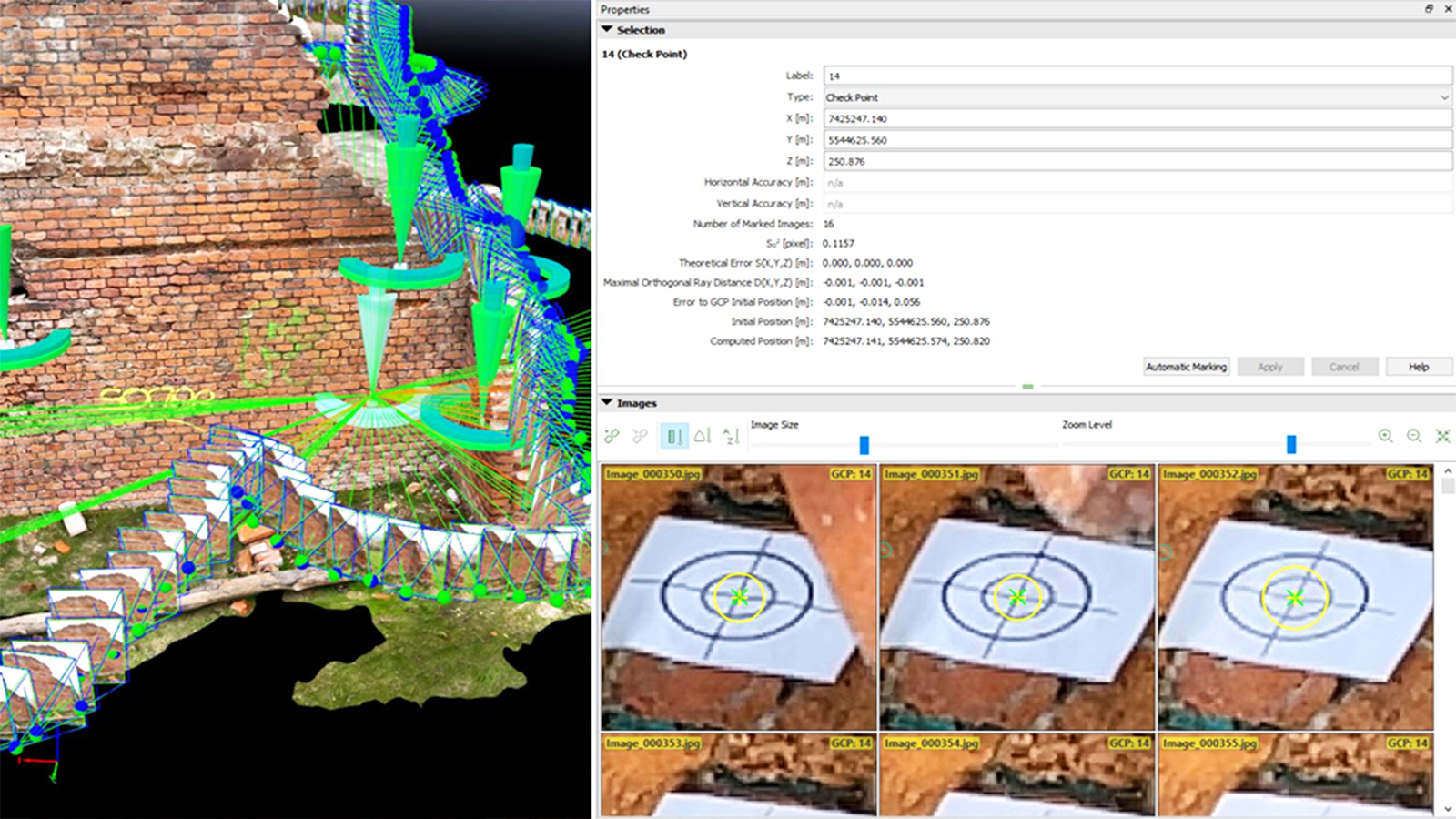
A equipe NaviGate tinha estabelecido 15 metas de cada conjunto de dados para comparar com os dados do GNSS coletados com a estação total. Todas as 15 metas foram comparadas e houve pequenas diferenças entre as coordenadas medidas com a estação total do Focus 35 e os fluxos de trabalho drone/móvel.
O erro quadrado RMSE para as medidas do drone e viDoc foram mais/menos 2cm no eixo X,Y, e Z. Isto significa que as medições feitas com base nestes conjuntos de dados atendem ao padrão do Grupo 1 exigido pela lei polonesa. Para referência, o Bureau Veritas certificou o revólver viDoc RTK para medições de Classe A (precisas até 5 cenitmetros).
O Xiaomi, sem RTK, estava correto a menos de 5 centímetros ao medir objetos que estavam a 2 metros de distância. Esta imprecisão poderia ser eliminada ou mitigada com o uso de GCPs ou pontos de controle específicos. Estes resultados destacaram o fluxo de trabalho simples do viDoc, pois era mais preciso e não exigia nenhum passo adicional para garantir essa precisão, ao contrário das GCPs que o Xiamoi precisaria.
Escolhendo entre fotogrametria aérea e terrestre
A equipe da NaviGate viu que eles tinham altos níveis de detalhes para ambas as formas de fotogrametria. As imagens aéreas e os dados da câmera P1 e do drone produziram um GSD preciso, apesar da alta altitude de vôo. Entretanto, como era um levantamento de um edifício individual de um único andar, o fluxo de trabalho do viDoc RTK provavelmente seria uma melhor escolha para projetos similares. Para levantamentos em larga escala, o mapeamento aéreo com um drone seria uma escolha menos trabalhosa.

As vantagens únicas do viDoc vêm de sua utilidade e versatilidade. É uma ferramenta altamente adaptável, leve e portátil, o que facilita o transporte para um local e o uso.
"Comparado aos métodos tradicionais de levantamento, tirar proveito de um dispositivo tão versátil oferece grandes oportunidades", explica Grzegorz Durlo, da NaviGate.
"O valor do equipamento será apreciado por pesquisadores e arqueólogos durante escavações e reconstrução de partes de objetos caracterizados por alta importância para a história e a cultura".
Recentemente, LiDAR em dispositivos móveis tem sido utilizado por clientes da NaviGate's para trabalhos incluindo medições de volume para silvicultura ou medição de volumes. Com a precisão do viDoc, essas medições de volume podem ser usadas para obras de construção ou trabalhos de levantamento terrestre.