Mapping Nepal: Drones and the future of disaster relief
In a natural disaster such as the earthquake that struck Nepal in spring 2015, up-to-date maps are essential.
In an emergency response scenario, maps and models provide critical information for disaster relief. Satellite imagery has been used in these situations for decades, but it's not without shortcomings: availability, spatial resolution and restrictive vertical perspective limit its usefulness.Drones, on the other hand, are low-cost and can be combined with image-processing software for frequent surveys of rapidly changing areas which are crucial in a disaster, such as in the case of the Colombian landslides.
Drone imagery offers a reliable oblique perspective without cloud coverage concerns. These advantages and the high resolution outputs generated by software like Pix4Dmapper have placed UAVs in the spotlight of the disaster response community.
In September 2015, Pix4D joined technology leaders and partners for a week-long UAV training mission in Nepal: teaching engineering students at Kathmandu University how to use drones and image-processing software for a wide range of humanitarian and development purposes.
More than a humanitarian aid mission
Humanitarian UAV Network (UAViators) founder Patrick Meier spearheaded the drone-mapping training in collaboration with Kathmandu University’s Department of Civil and Geomatics Engineering, Kathmandu Living Labs, DJI, Pix4D and Smartisan, with the intent of building a community of Nepali UAV operators skilled in imagery analysis.
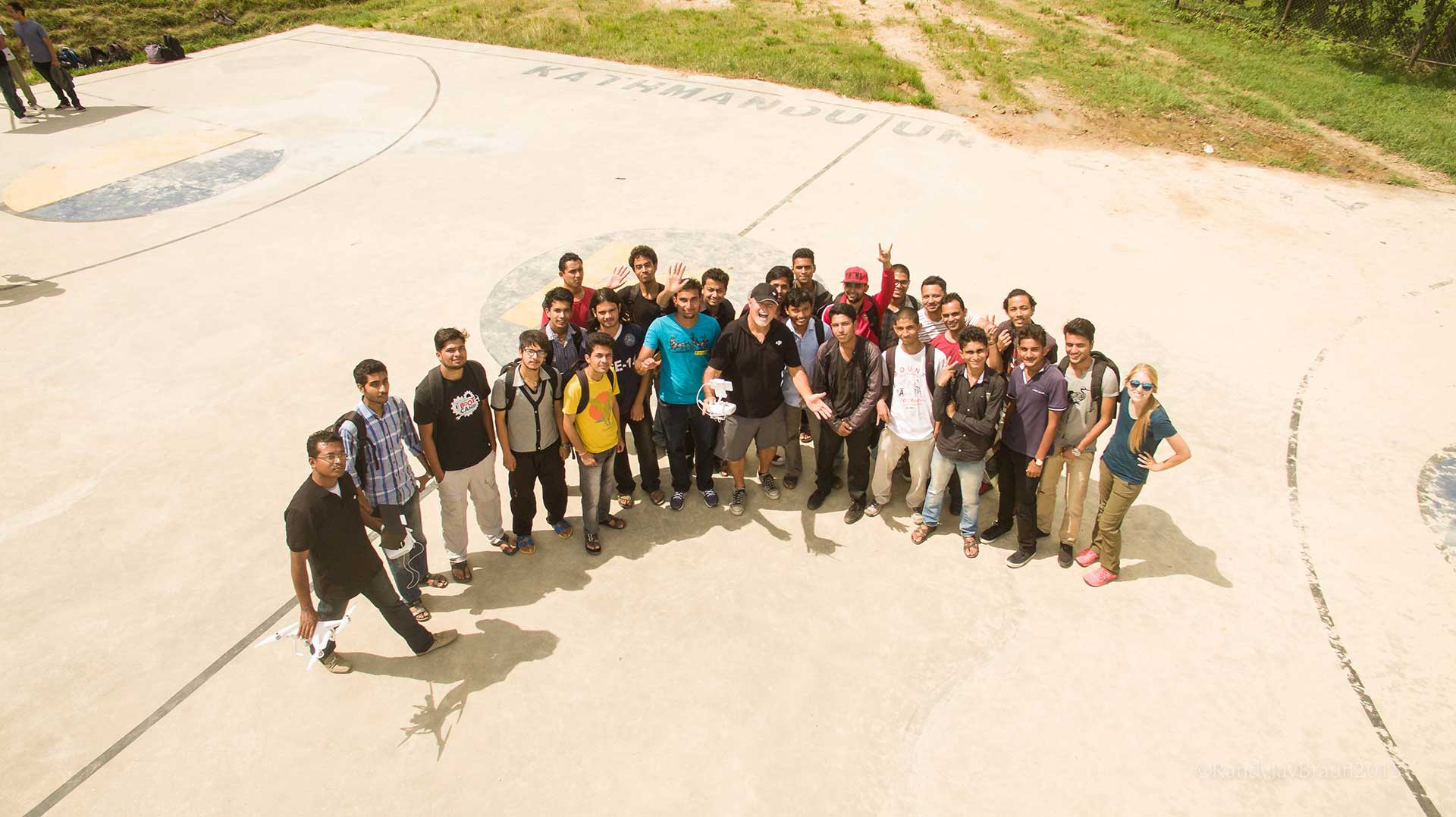
Before the training, Kathmandu University (KU) had already been conducting research with drones and was looking to expand its expertise. Thirty two participants from different organisations (KU, Land Management Training Center, Nepal Survey Department, ICIMOD, Nepal Police, Practical Action Nepal, NSET and KLL) learned drone operation guidelines and regulations from KU staff, the Civil Aviation Authority of Nepal (CAAN) and UAViators. They also trained in drone navigation with DJI, photogrammetric software with Pix4D, and Open Street Map usage with KLL.
Participants used the free Pix4Dcapture app to create specialized flight plans for image acquisition, then used photogrammetry software Pix4Dmapper to turn that data into 3D models and maps for further analysis.


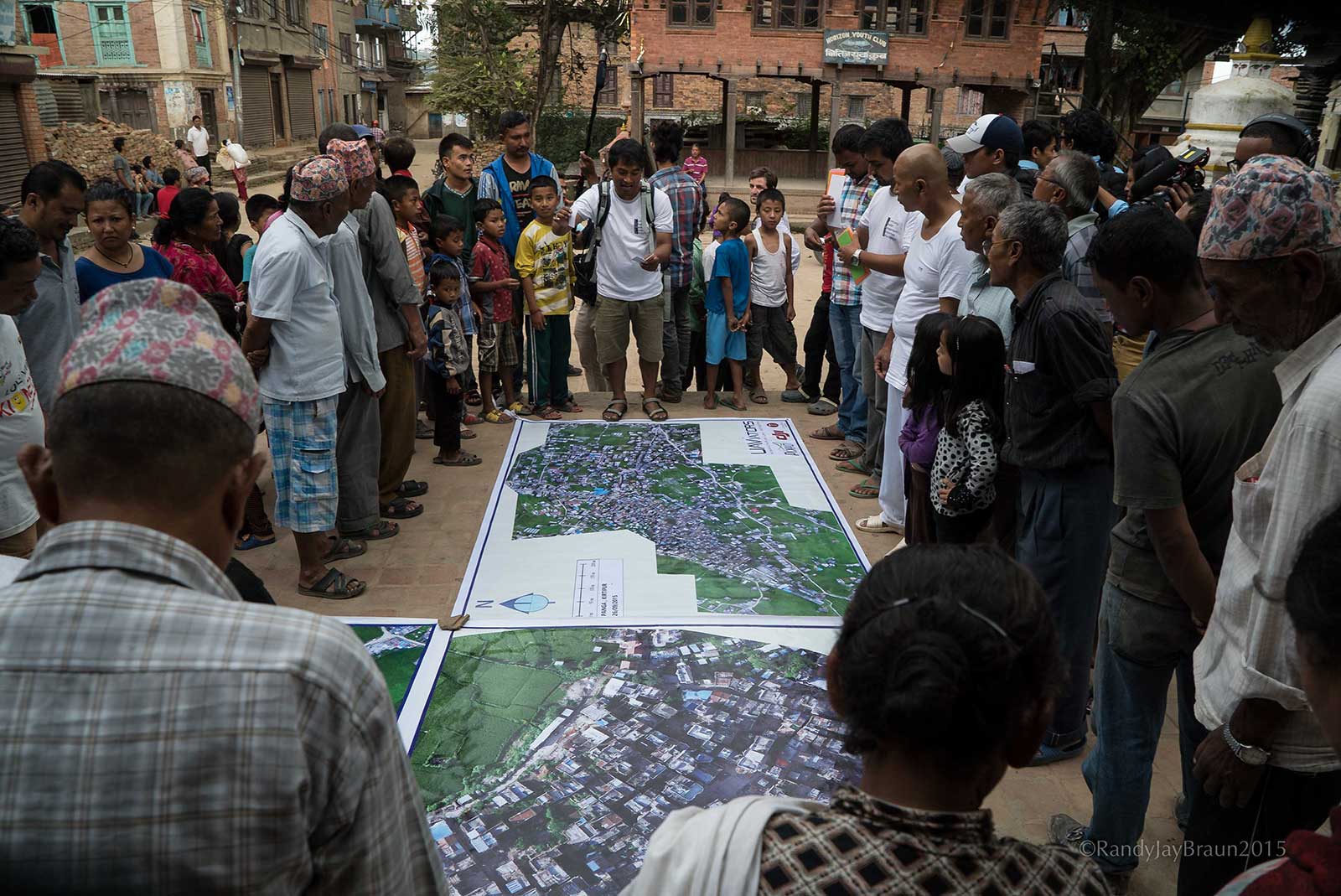
During operational training in the field, participants worked alongside DJI, Pix4D, and the Community Disaster Management Committee (CDMC) of Panga - a village that had been badly damaged in the earthquake - to create a complete map of the area. Using Phantom 3 Advanced quadcopters and Pix4Dmapper, orthomosaics were produced overnight for the community to use in the reconstruction process and disaster preparedness.
While this training had a humanitarian base, the goal was to demonstrate the potential drones and image analysis have for positive impact in disaster situations. Participants gained firsthand experience in the field while gaining practical knowledge. Their collaboration and innovation will continue to see the applications of drone imagery and mapping software in disaster response and more.

Project details
| Date | September 2015 |
| Location | Panga, Nepal |
| Teams involved | Pix4D UAViators Kathmandu University Department of Civil and Geomatics Engineering Kathmandu Living Labs (KLL) DJI Smartisan Kike Calvo (photographer). |
| UAV | DJI Phantom 3 Advanced |
| Software | Pix4Dcapture, Pix4Dmapper |
| Flight time | 9 small flights and 45 minutes total flight time |
| Images acquired | Around 900 |
| Resolution | 3.4cm |
Arriving on the disaster scene
The team coordinated with the local Community Disaster Management Committee (CDMC) to see which areas needed to be mapped the most. Permission to fly had already been obtained from the Civil Aviation Authority (CAAN).
As streets were not clear, the team climbed on the rooftop of the highest building in the area to stay clear of the debris, powerlines and people below. This also ensured safe flying as it kept the drone within line of sight.



Although the Phantom drone had up to 20 minutes of flight time, the team kept the flights short, because high levels of airwave interference shortened the distance the drone and controller could be apart without risking a loss of connection for image triggering.
Without this interference, the area covered could be much larger and by fewer flights, although for this project, most of the time expended was from climbing to the top of each building.

As soon as the drone landed, the teams ensured the pictures were captured correctly, while we were still on site. They did so using our phone's browser.

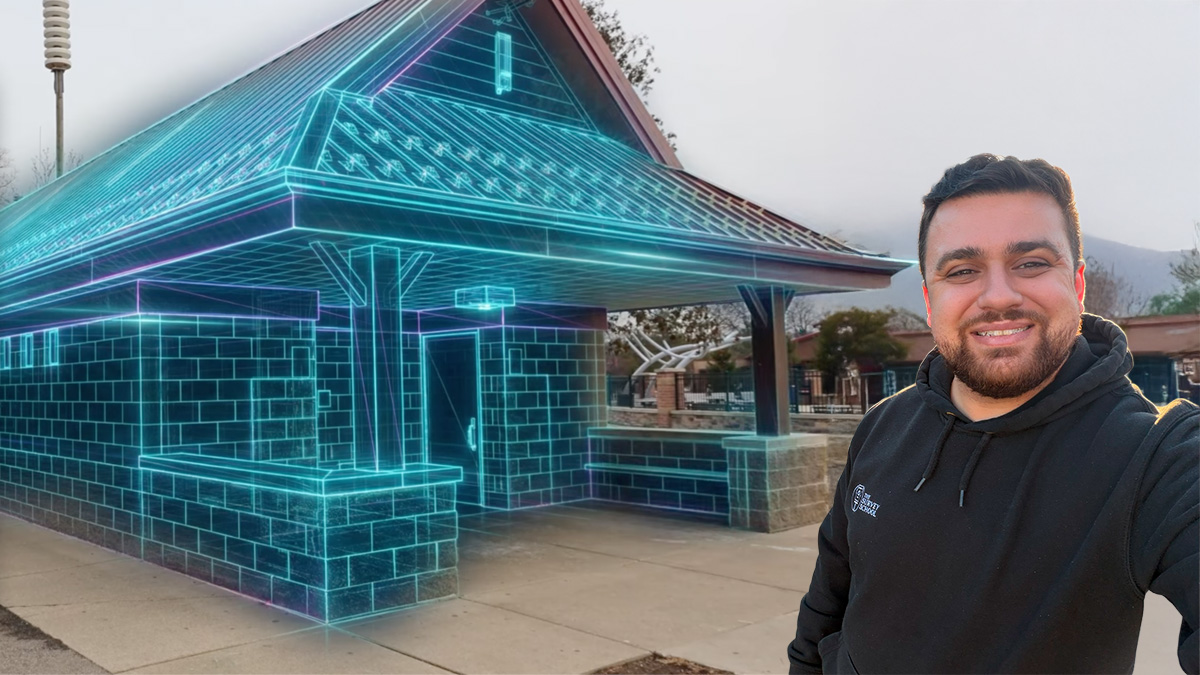
Processing the images
Using Pix4Dmapper on the laptop, the team selected the 3D Maps template with default (WGS84) coordinate system.
The software’s automatic processing comprises three main steps: The first step optimizes camera positions and analyzes image information, extracting keypoints and matching them across the images. The second step builds a 3D point cloud and model, and the third step generates the DSM and orthomosaic.
We learned just how useful, beyond what we had in mind, these maps can be both in disaster preparedness, response, and as tools to preserve cultural aspects of an area.Patrick MeierFounder, Humanitarian UAV Network
All of the images from different flights were processed together in one project, taking around 70 minutes on a MSI laptop with an i7 quad core and GTX 970M GPU. For projects where this is not possible, such as flights with very different resolutions, flights can be processed separately and merged together by creating manual tie points between the images.
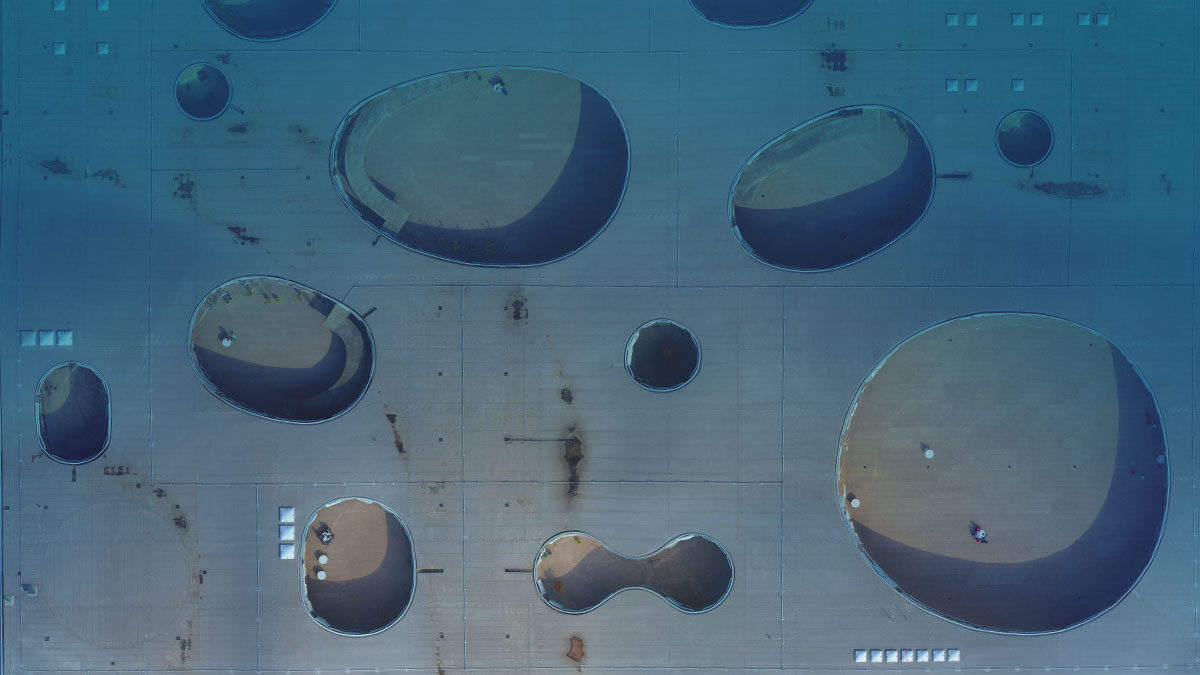
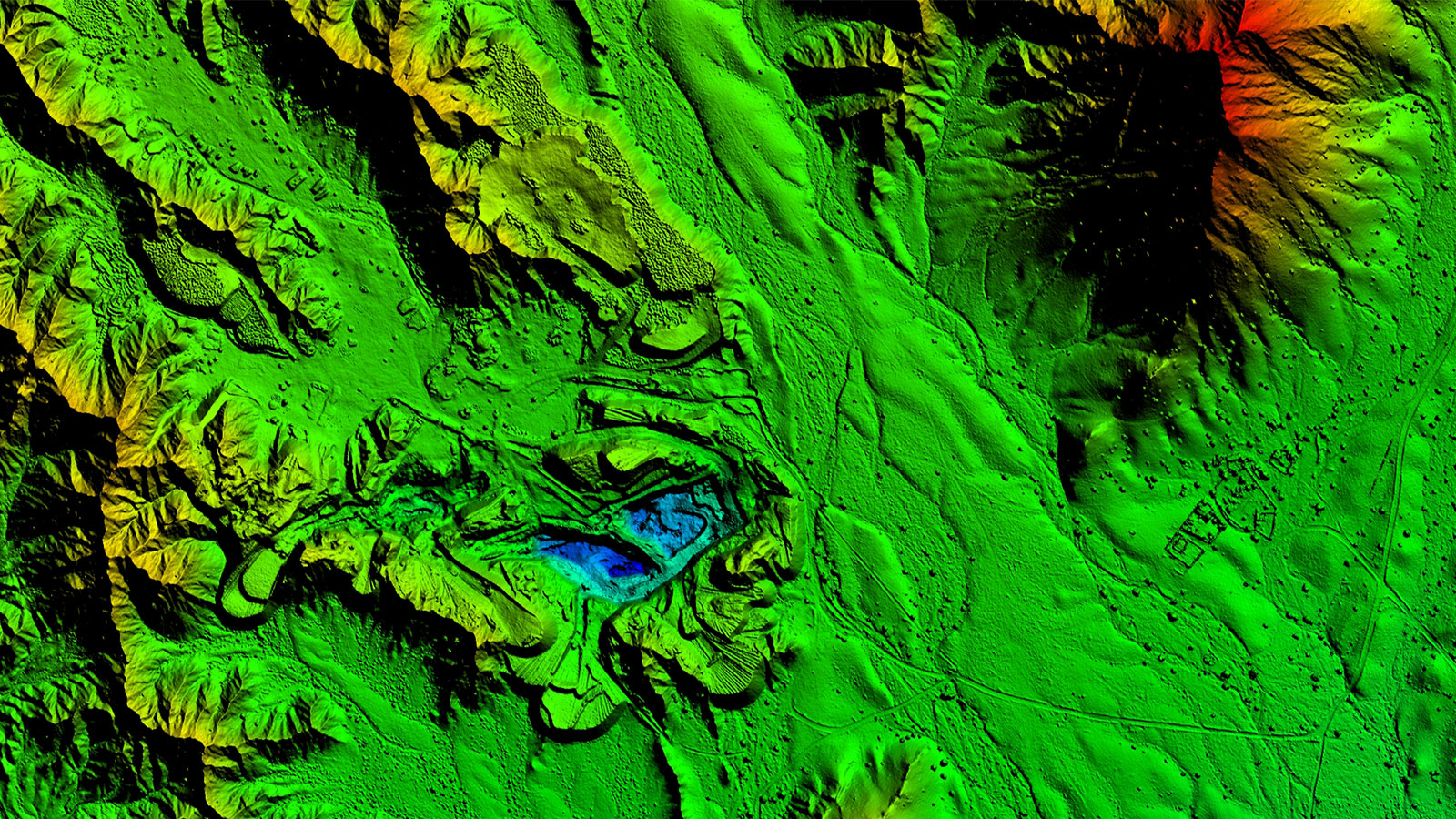
Analyzing results
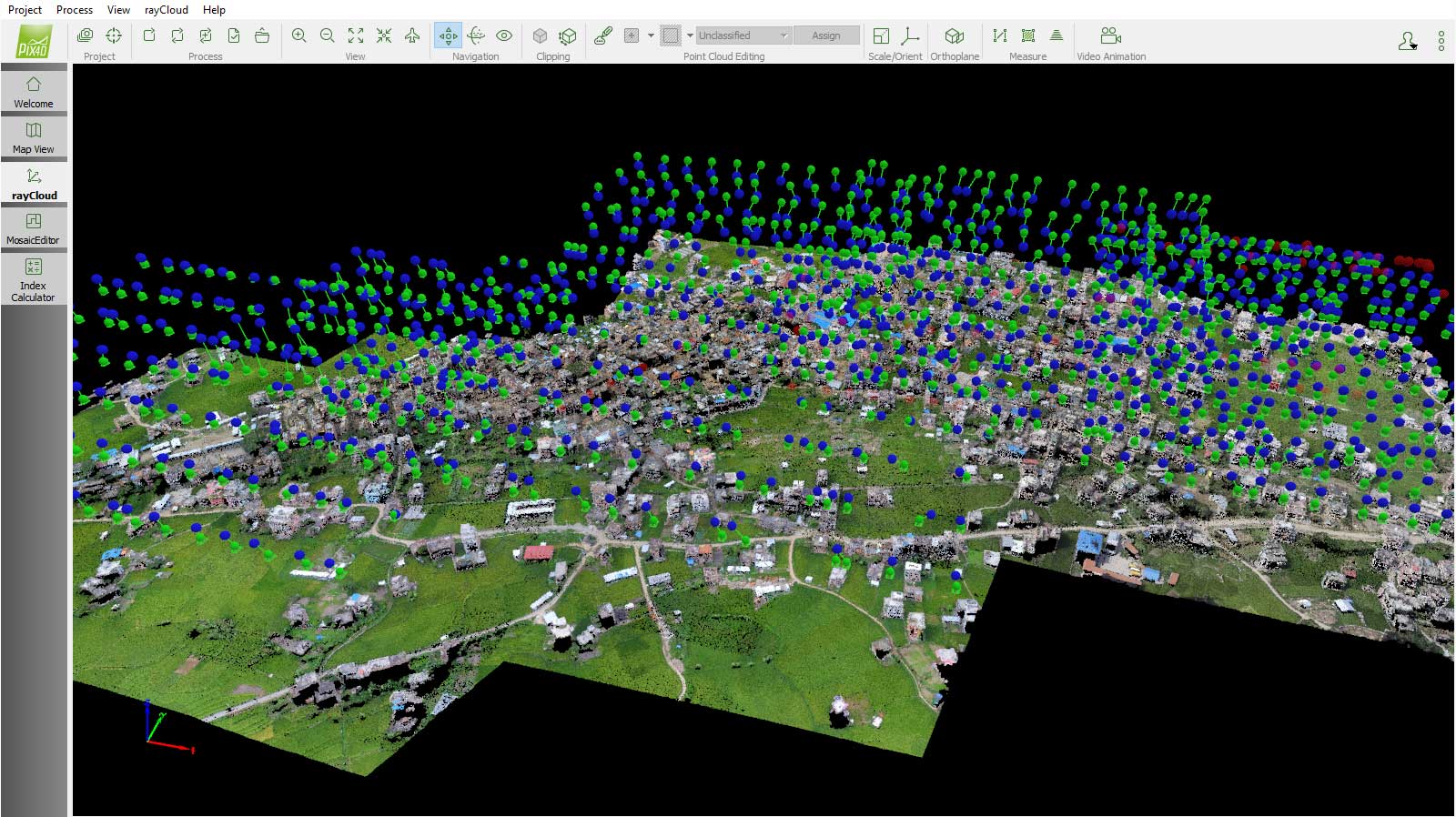
The team obtained a 3D point cloud, 3D model, and 2D map (orthomosaic) of the village of Panga.
Instead of vertical or close to nadir imagery with meter-resolution offered by satellite maps, the data was at centimeter resolution and provides a more comprehensive perspective with its oblique viewing angle.
Pix4Dmapper's built in-tools such as the rayCloud and mosaic editor, gave the team control over the accuracy and quality of the project.


View a 3D model of the damaged region on Sketchfab.
This project, undertaken in 2015, helped prove the benefits of drones for emergency response and public safety. The engineering students from Kathmandu University gained valuable on-the-ground experience while helping support the community in rebuilding.