徹底比較!フォトグラメトリとモバイルLiDARの点群の違い
近年、手軽に三次元点群を生成する方法としてモバイルLiDAR技術への注目が高まっています。一方で、PIX4Dcatch のように画像から三次元点群を作成するフォトグラメトリ技術もあります。LiDARとフォトグラメトリの2つの点群のアウトプットにはどのような違いがあるのか、比較実証の結果をご紹介します。
LiDARとフォトグラメトリの技術的な違いについてはこちらの記事をご参考ください。
実証環境
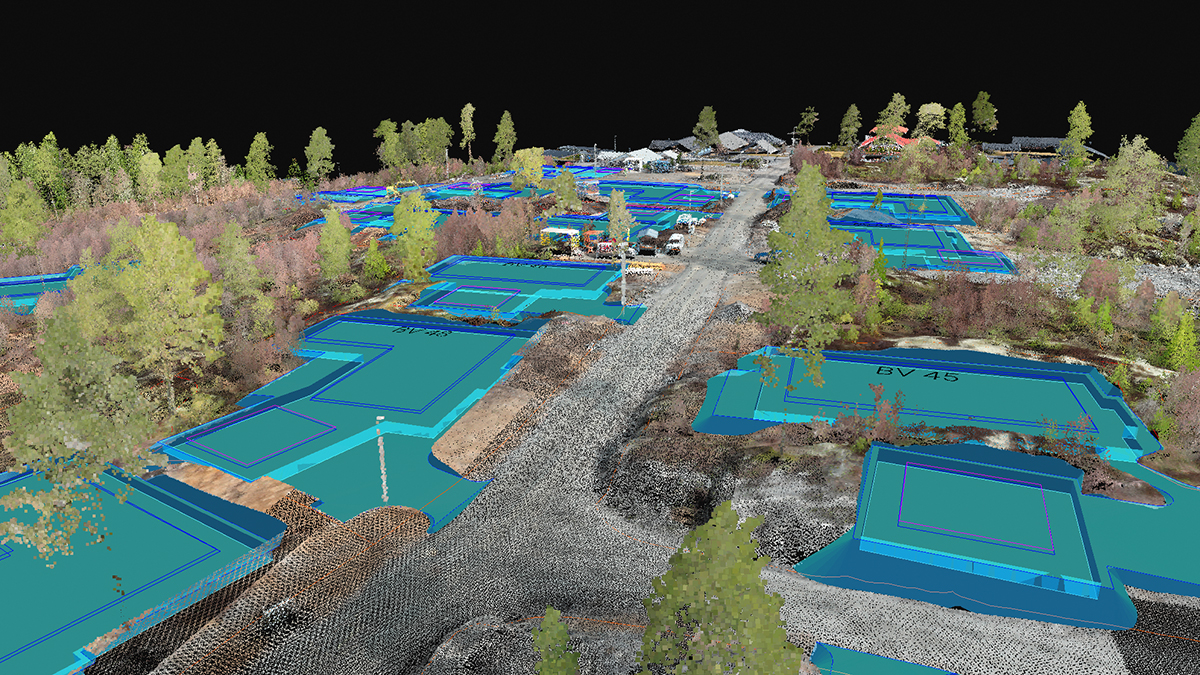
実証は、2023年10月に国土交通省 国土技術政策総合研究所がもつ茨城県のDXフィールドで行われました。 DXフィールドにある構造物をPIX4Dcatch RTKと他社のモバイルLiDARアプリでスキャンをし、アウトプットを比較しました。フォトグラメトリ技術とLiDAR技術の比較をするため、実証では__PIX4Dcatch RTKではフォトグラメトリ機能のみを利用__しました。
実証結果:
三次元点群の密度・エッジの再現性
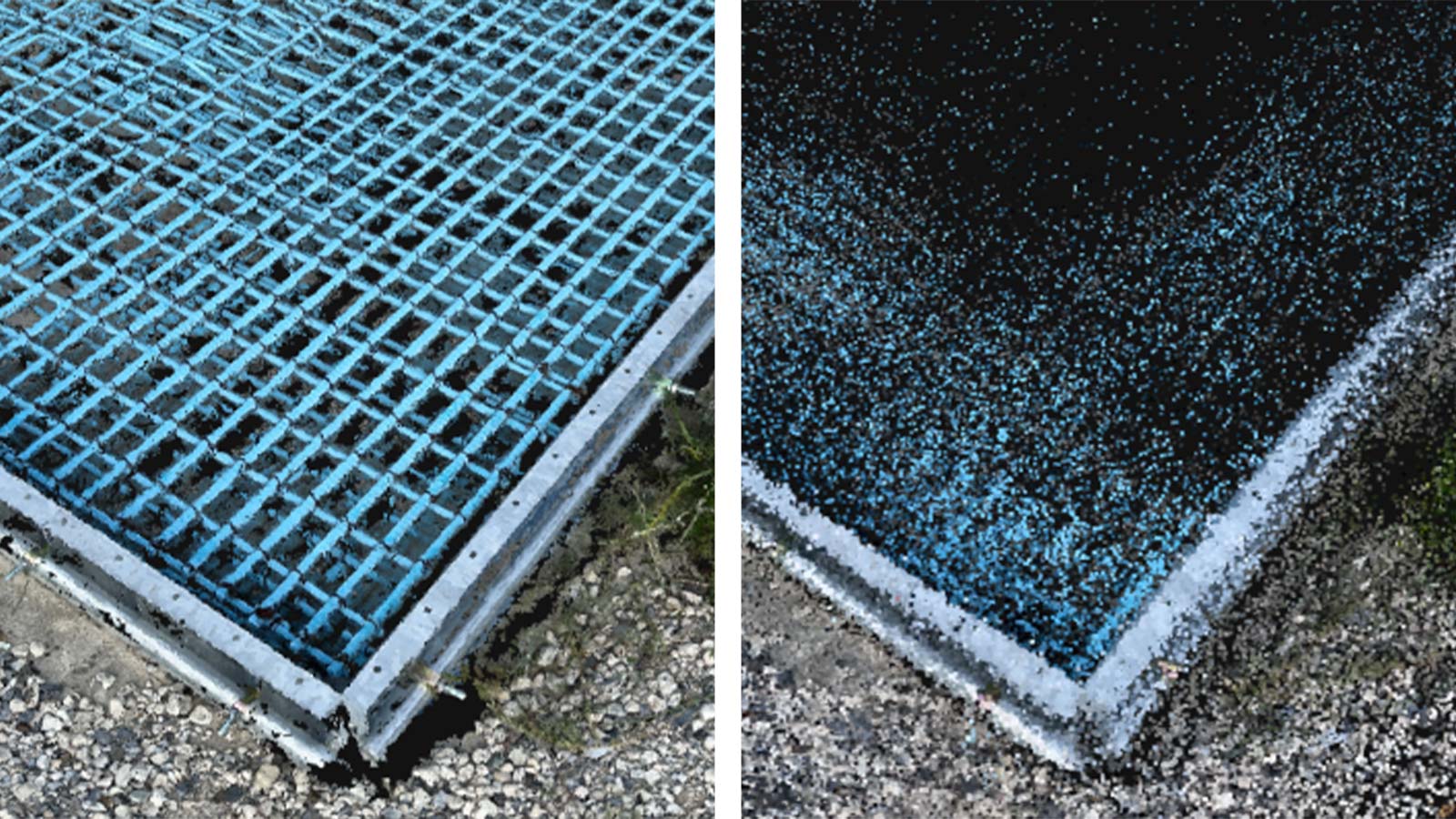
こちら�はコンクリートブロックをスキャンして生成された三次元点群です。 モバイルLiDARで生成した点群と比べて、画像から生成されるフォトグラメトリ点群は密度が高く、縁に置いてある5cm x 5cmのGCPも視認することができます。

モバイルLiDARとフォトグラメトリの点密度の違いは、複雑な表面を持つ構造物だととくに顕著です。画像からピクセルベースで三次元点群を生成するフォトグラメトリ技術では、細かい形状も再現することができます。
三次元点群の密度・エッジの再現性
モバイル端末についているLiDARは、測量用途のLiDARスキャナーと比べて密度が低いため、点群の密度が薄くなりがちです。また、照射されたLiDARがピンポイントで当たっていないと点群化できないため、エッジの再現も得意ではありません。
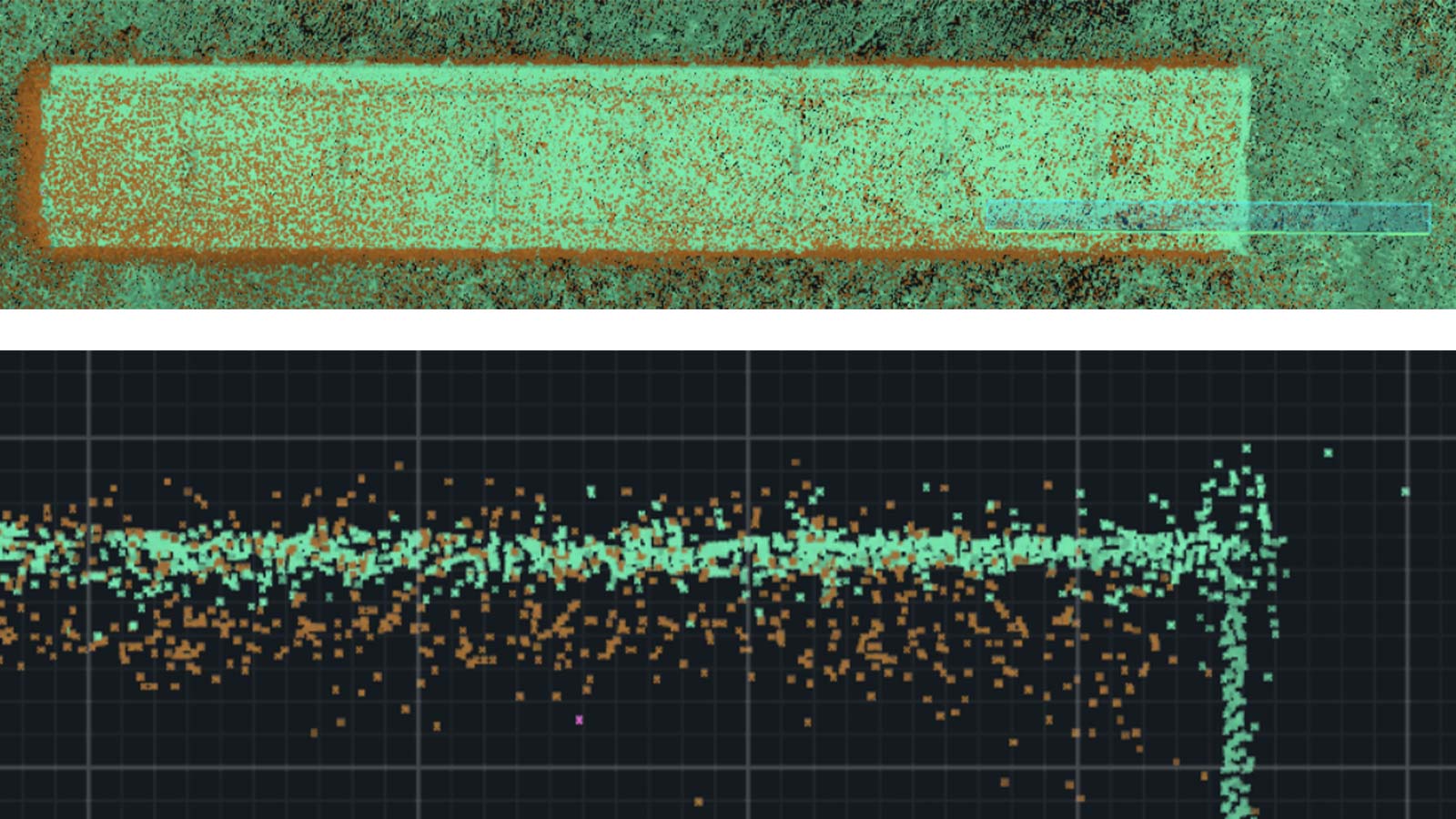
以下は、ブロックの断面図です。 オレンジがモバイルLiDAR点群で、緑がフォトグラメトリ点群です。前者はまばらに点在しているのに比べ、後者はエッジまでキレイに再現しています。
精度比較
構造物の横幅の実測値を計測し、三次元点群と比較をしました。 実測した値は3.180mでした。

PIX4Dcatch RTKで取得した点群では、誤差0.004m という結果でした。 一方、モバイルLiDARから生成した点群は広い範囲に散在しているため、どの点で計測するかによって結果がセンチレベルで変わってしまいます。外側の点を基準にした場合は誤差0.047m、中心部にある点を基準にした場合は誤差0.012mという結果になりました。
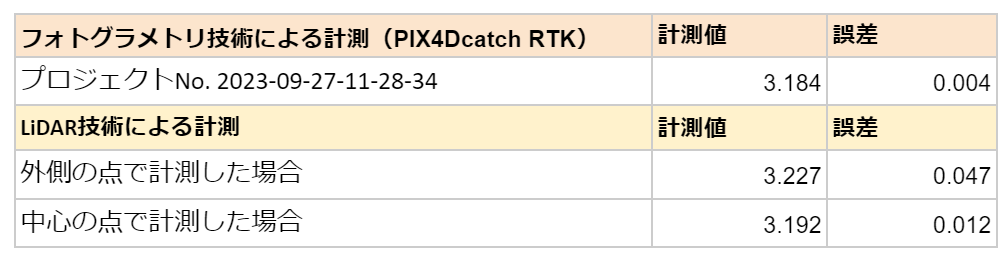
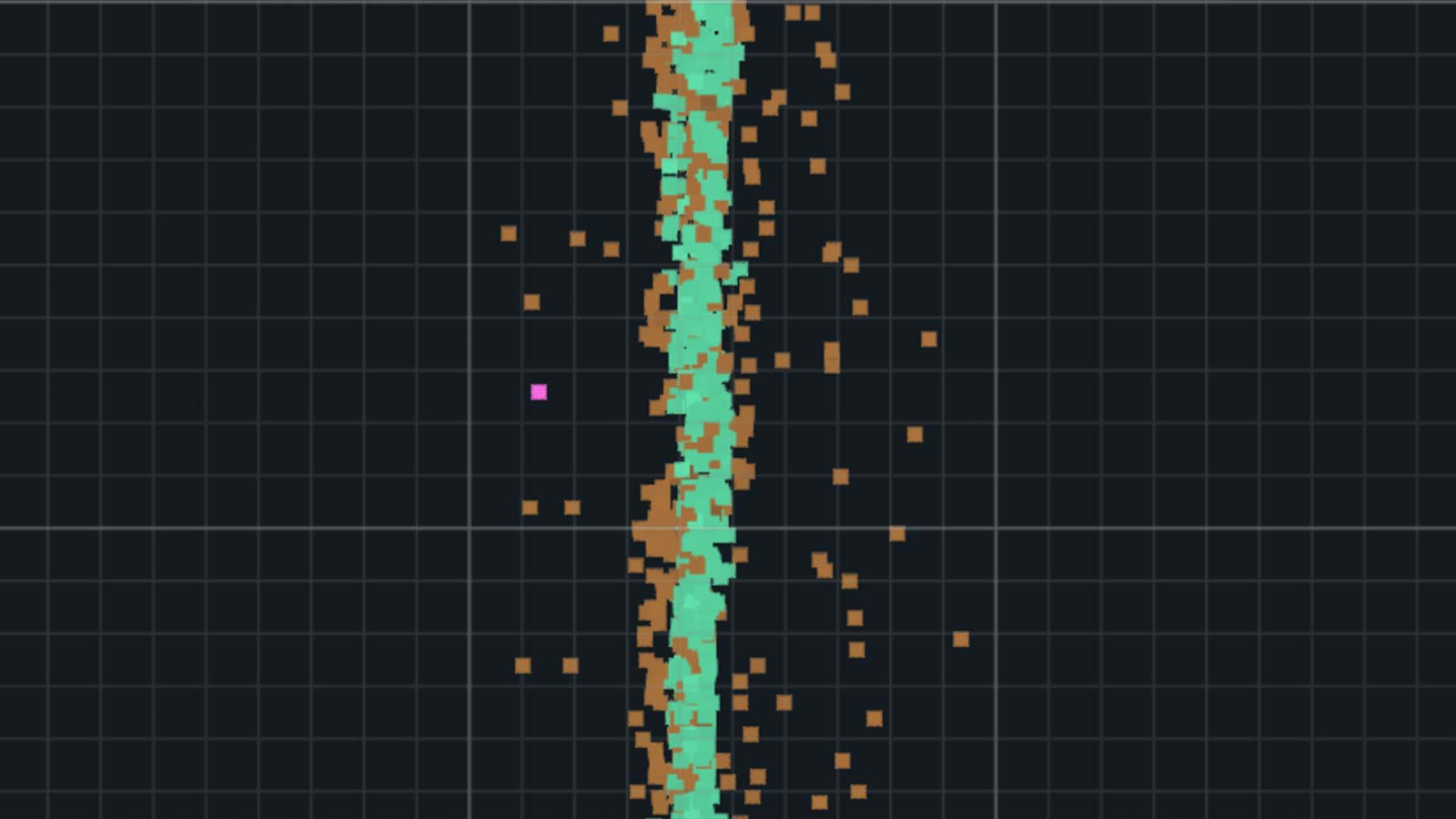
上記の画像において1グリッドは1cmを表しているため、LiDAR点群の場合はどの点で計測するかによって計測結果が最大7-8cmほど変わってしまいます。
広範囲・高さのある対象物
iPhoneやiPadの内蔵LiDARの有効照射距離は5mとされています。 そのため、広範囲をスキャンする場合はモバイル端末を上下左右に大きく動かしながらスキャンする必��要があります。また、高い建物であれば、5m以上の高さのある部分はスキャンすることができません。
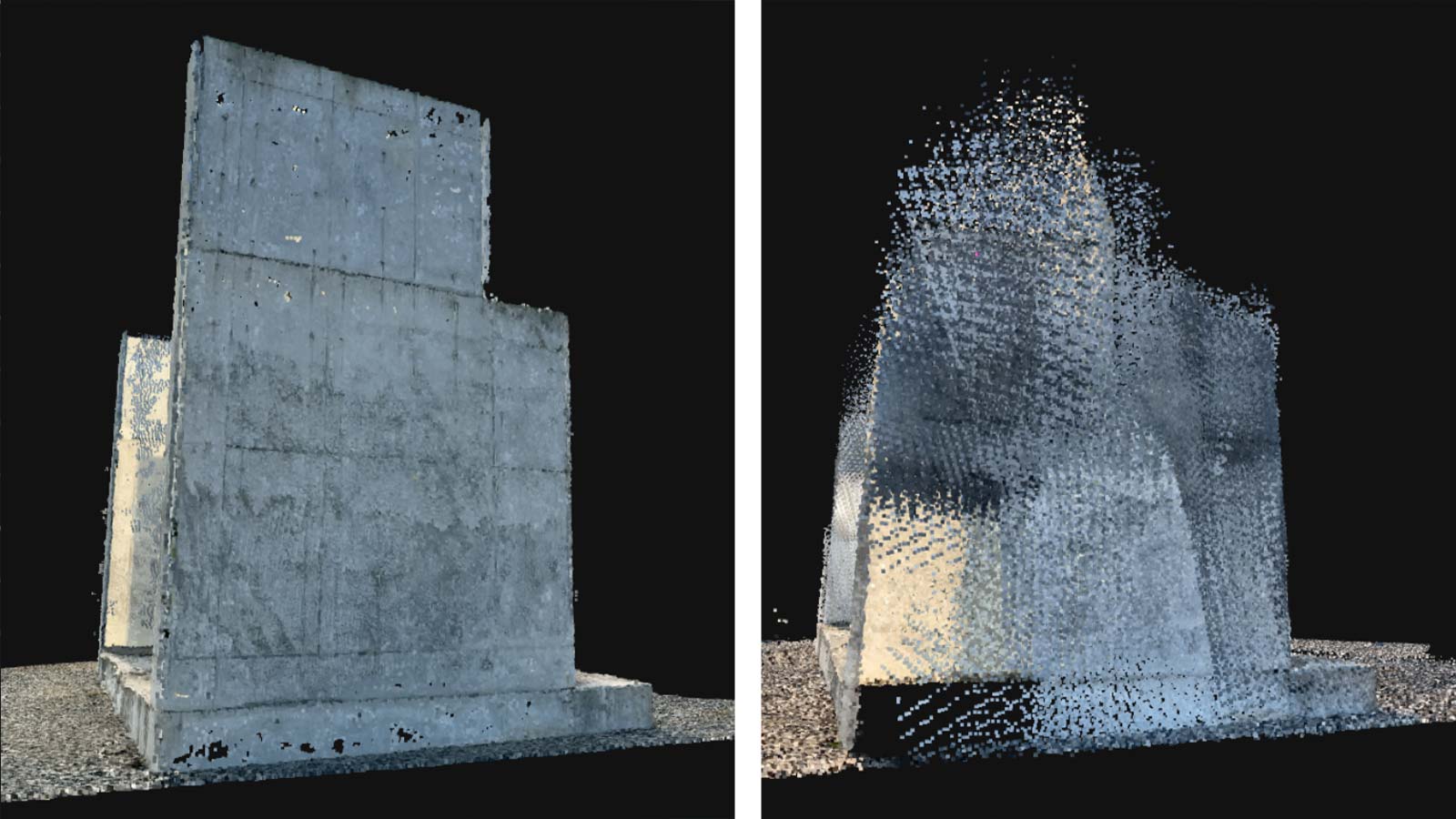
一方で画像をインプットとするフォトグラメトリでは、画像に映っている限り遠方にあるものも再現することが可能です。以下の画像は6.6mの構造物を再現したものです。フォトグラメトリ点群はPIX4Dcatch RTKをもって1周しただけでスキャンが完了しました。
フォトグラメトリとLiDARの利点を組み合わせるPIX4Dcatch RTK
今回の実証を通して、点密度、エッジの再現性、広範囲の点群取得といったフォトグラメトリの利点を実際のアウトプットで確認することができました。
一方、モバイルLiDAR技術には処理が不要のため、すぐに結果を確認できるという利便性もあります。PIX4Dcatch RTKでは、フォトグラメトリを基本としていますが、LiDAR付きの端末(※)を利用する場合は補完的にモバイルLiDARを組み合わせることができ、スキャンの結果をその場で確認するプレビュー機能として利用しています。また、車の表面などフォトグラメトリが苦手とするつるつるした表面の再現などにもモバイルLiDARで取得した点群を利用することができます。素晴らしい2つの技術を組み合わせたPIX4Dcatch RTKをぜひご利用ください。
※ LiDAR付きの端末の詳細はこちらよりご確認ください。*