

Liefern RTK-/PPK-Drohnen bessere Ergebnisse als GCPs?
Bei der Drohnenkartierung und Photogrammetrie kommt es auf Präzision an. Aber die Vielfalt der auf dem Markt erhältlichen Lösungen macht die Entscheidung nicht leicht.
Deshalb haben wir Drohnen mit und ohne RTK-Modul in verschiedenen realistischen Szenarien ausgiebig getestet und verglichen, damit Sie sich informieren und leichter zu einer Entscheidung gelangen können.
Drohnen mit und ohne RTK-Modul im Vergleich
Sind Drohnen ohne RTK-Modul überhaupt präzise genug?
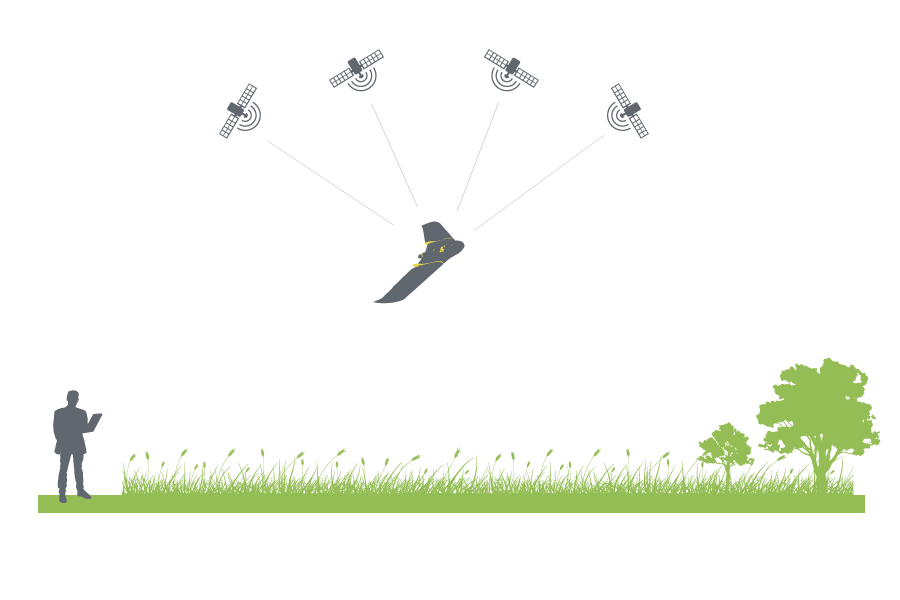
Wenn Sie eine nicht RTK-fähige Drohne mit integriertem GPS-Empfänger oder mit einer GPS-fähigen Kamera fliegen, werden die Kamerapositionen per Trilateration über Satelliten, also mithilfe von Entfernungs- bzw. Abstandsmessungen, ermittelt.
Dabei sind je nach Gerätequalität und Satellitengeometrie in der Regel Abweichungen von bis zu mehreren Metern zu erwarten (vor allem entlang der Z-Achse).
• So verbessern Sie die Präzision Ihrer Drohnenkartierungsprojekte
RTK-Drohnen – ohne Datenverbindung geht es nicht
Über eine Datenverbindung wie GSM oder WLAN kann eine RTK-Drohne Signale von einer Basisstation oder virtuellen Referenzstation (VRS) empfangen. Diese Datenverbindung wird auf dem Laptop hergestellt, den Sie zur Flugsteuerung verwenden. Die Kamerapositionen werden in Echtzeit unter Bezugnahme auf geodätische Referenzpunkte berechnet, deren genaue Positionen über einen langen Zeitraum gemessen wurden. So können die Kamerapositionen horizontal und vertikal zentimetergenau (auf 2–3 cm) korrigiert werden.
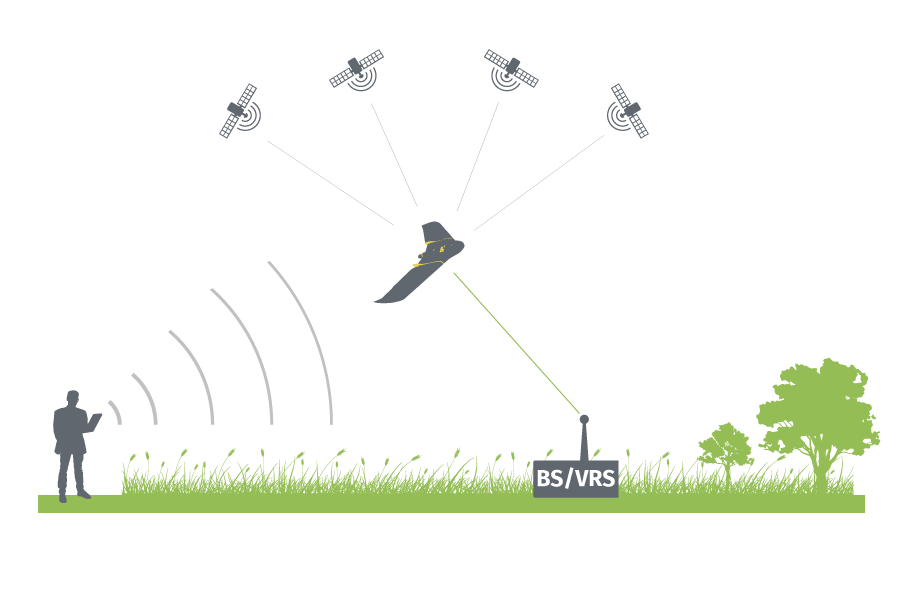
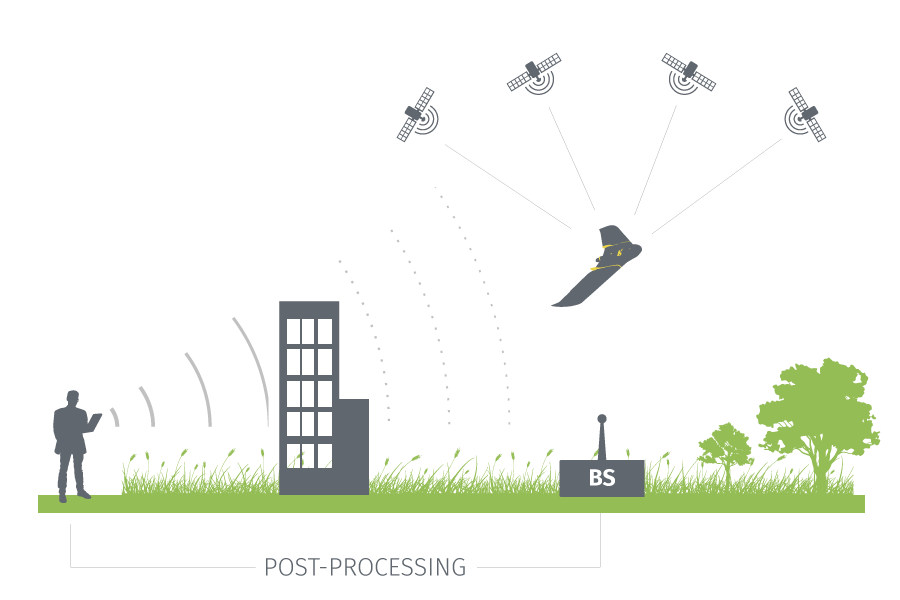
Allerdings können dabei immer einmal Pannen passieren. Die Datenverbindung vor Ort ist eventuell nicht zuverlässig, sodass die Echtzeitkorrekturen der Kamerapositionen nicht stimmen. Das System gibt dann sogenannte Float-Lösungen aus oder wird sogar in den autonomen Modus versetzt. Kamerapositionen, deren Korrekturen Mehrdeutigkeiten aufweisen, werden als RTK-Float bezeichnet. Bei RTK-Float liegt die Genauigkeit dann wieder im Dezimeter- oder sogar im Meterbereich, ähnlich wie bei Flügen ohne RTK. In diesem Fall können Sie mit einer PPK-Drohne eine nachträgliche Berechnung unter Zuhilfenahme der geodätischen Referenzpunkte durchführen.
Was ist mit Bodenpasspunkten?
Was bietet höhere Präzision? RTK, PPK oder GCPs?
Wenn aus verschiedenen Gründen keine Bodenpasspunkte (Ground Control Points; GCPs) erstellt werden sollen, beispielsweise aufgrund schwierigen Geländes oder aufgrund des Messaufwands, dann sind RTK-/PPK-Drohnen gegenüber Drohnen ohne RTK-Funktion die bessere Wahl.
Allerdings benötigen Sie für eine RTK-/PPK-Drohne spezielle Hardware und Software, denn das gesamte System muss die Kommunikation mit Basisstationen oder VRS unterstützen und zudem Nachbearbeitungsfunktionen umfassen. Zusätzlich benötigen Sie eine kompatible Bildverarbeitungssoftware wie Pix4Dmapper, die die unterschiedlichen Präzisionsstufen der einzelnen Kamerapositionen berücksichtigt.
Aufgrund all dieser technischen Anforderungen sind RTK-/PPK-Drohnen deutlich teurer in der Anschaffung als herkömmliche Drohnen. Eine immer beliebtere Alternative ist allerdings die Ausstattung einer herkömmlichen Drohne mit RTK-/PPK-Funktionaliät. In diesem Artikel sehen wir uns an, welche Qualitätsunterschiede bei RTK-/PPK-Flügen ohne Verwendung von GCPs und bei Drohnenflügen ohne RTK-Funktion (aber mit ausreichend verteilten GCPs) auftreten. Die Informationen sollen Ihnen helfen herauszufinden, ob sich für Sie die Investition in eine neue Drohne lohnt oder ob Sie doch vorerst bei GCPs bleiben möchten.
Um die Qualität angemessen zu beurteilen, wurden jeweils zwei Flüge durchgeführt: einer im RTK-Modus und einer im autonomen Modus (also mit deaktivierter Echtzeitkorrektur oder mit Verbindungsunterbrechung im Flug). Die Flüge fanden zudem über zwei unterschiedlichen Geländearten statt (Getreidefelder und Stadtgebiet).


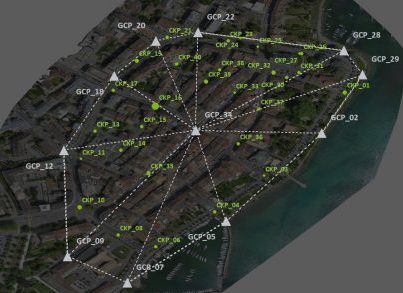
Die Flüge wurden mit einer senseFly eBee Plus durchgeführt, und zur Messung der GCPs wurde Javad Triumph-ls verwendet. Die Flüge im gleichen Gelände (RTK und autonom) basierten jeweils auf identischen Konfigurationen. Mithilfe der Bodenpasspunkte korrigierten wir die Kamerapositionen bei den autonomen Flügen, und zur Präzisionsbewertung wurden für beide Modi dieselben Prüfpunkte verwendet.
Alle Projekte wurden mit Pix4Dmapper unter Verwendung der Standard-3D-Kartenvorlage verarbeitet.
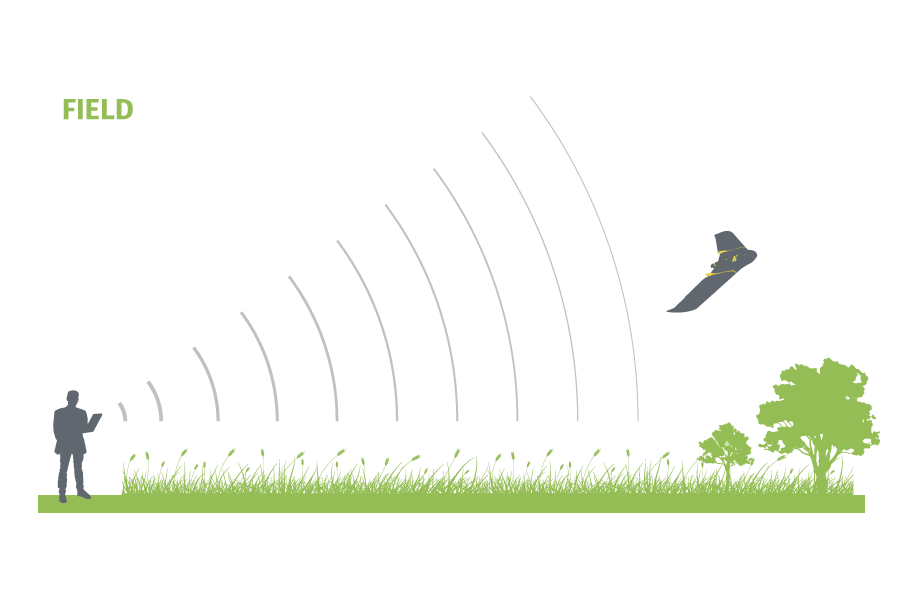
Der erste Test: Flug über Feldern
Einfachraster, Höhe = 102 m (GSD 2,5 cm), Überlappung 80 %
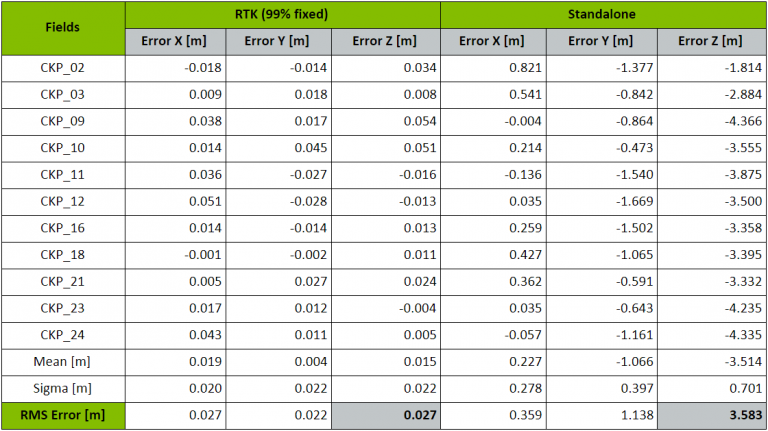
Beim Flug über einem Feld sind kaum Signalabschirmungen aufgrund von Gebäuden usw. zu erwarten. 99 % der Kamerapositionen bei unserem RTK-Flug sind so eindeutig festgesetzt (RTK-Fixed), dass keine Nachbearbeitung (PPK) erforderlich ist.
Hier werden ein RTK-Flug ohne GCPs und ein Flug im autonomen Modus mit ausreichend verteilten GCPs auf Präzisionsunterschiede hin verglichen. Das Ergebnis des RTK-Flugs über dem Feld ist durchaus beeindruckend.
Die Präzision beträgt ca. 1 Pixel (2,5 cm) in alle Richtungen (X, Y, Z), und im autonomen Modus beträgt die vertikale Präzision 3,6 m – was erwartet werden kann ohne Positionskorrekturen anzuwenden oder GCPs zu nutzen.
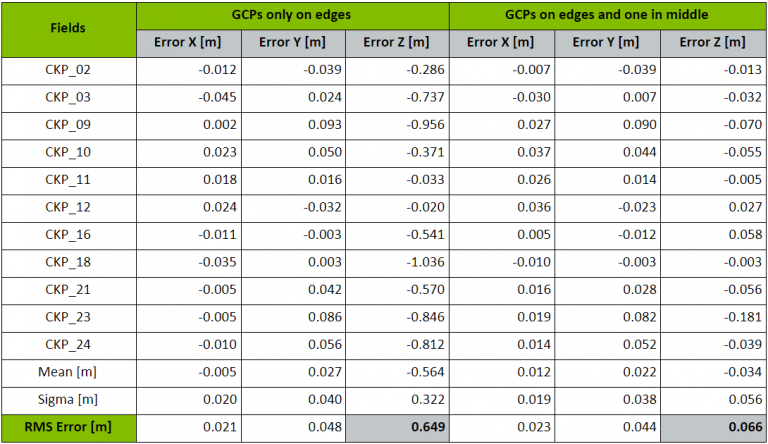
Nach der Anwendung von GCPs gingen die Fehler auf der Z-Achse stark zurück. Allerdings stellte sich heraus, dass die Verteilung der Passpunkte bei dieser Art von Projekt ebenfalls eine große Rolle spielt. Hier haben wir die Präzision bei unterschiedlicher Platzierung der GCPs verglichen.
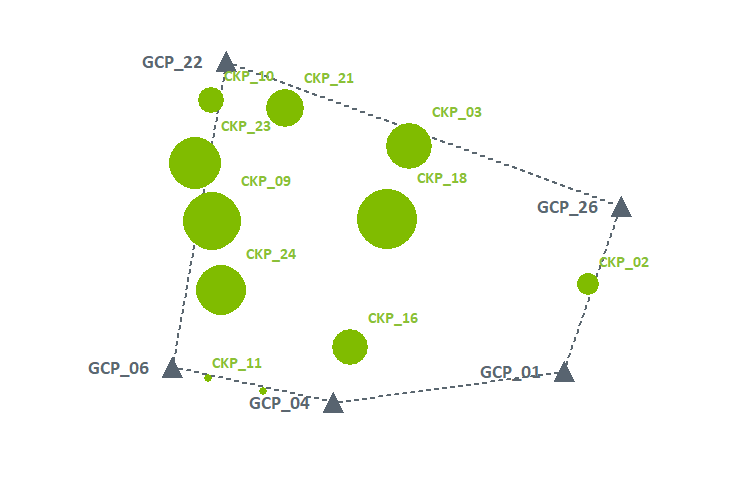
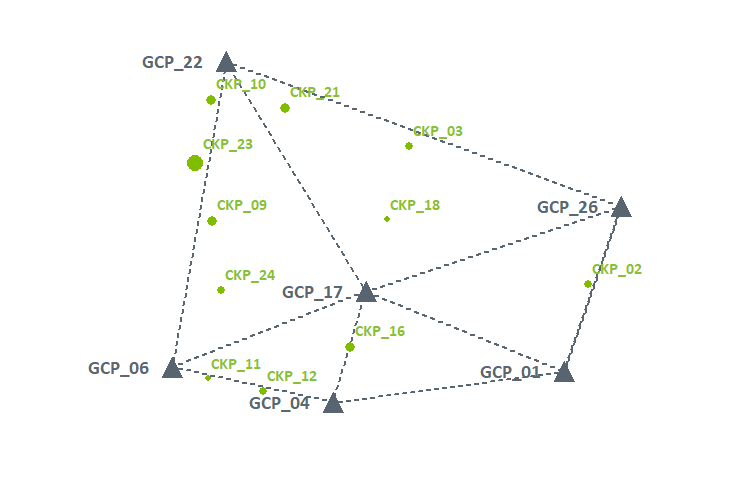
Aus dem Diagramm wird ersichtlich, dass die vertikale Präzision durch Platzieren eines weiteren GCP in der Feldmitte von 65 cm auf ca. 6,6 cm verbessert werden konnte. Je weiter man sich von den GCPs entfernt und je schwieriger das umliegende Gelände ist, desto größer wird auch der Fehler.
Mit „schwierig“ ist hier Gelände gemeint, das nicht über genug eindeutige Merkmale verfügt, sodass der Bildabgleich erschwert wird – wie in diesem Fall ein Getreidefeld. Bei Bildern, die über solchem Gelände aufgenommen wurden, treten mehr Positionsfehler auf und die Präzision nimmt ab. IIn diesem Fall dienen die präzisen Kamerapositionen (99 % RTK-fixiert in der ersten Phase) als dichte und gut verteilte GCPs.
Flug über einem Stadtgebiet
Doppelraster, Höhe = 102 m (GSD 2,5 cm), Überlappung 80 %
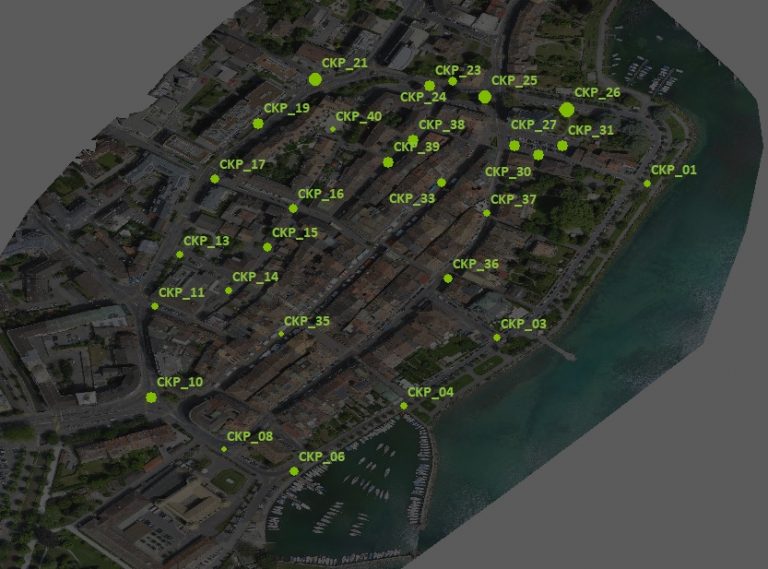
Der Flug mit einer Starrflüglerdrohne über dicht besiedeltem Gebiet ist etwas anspruchsvoller. Genehmigungsfragen sind zu klären und Sie benötigen Sie eine freie Fläche für Start und Landung – das ist mitten in der Stadt nicht immer machbar.

In this project, we found a spacious sports park close to the city center. The buildings, trees, and local Wi-Fi interfered the data-link connections during the flight. It turned out that only 71% of the camera positions were well-corrected (RTK-fixed).
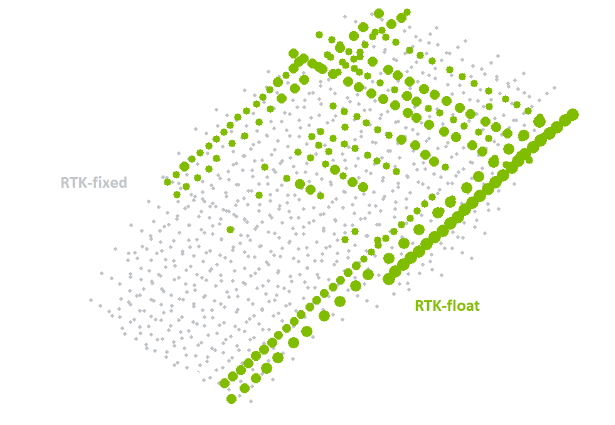
In realen Einsätzen verhinderte die ungleichmäßige Verteilung der RTK-Float-Lösung (nicht gut korrigierte Positionen) eine Verbesserung der Gesamtpräzision.
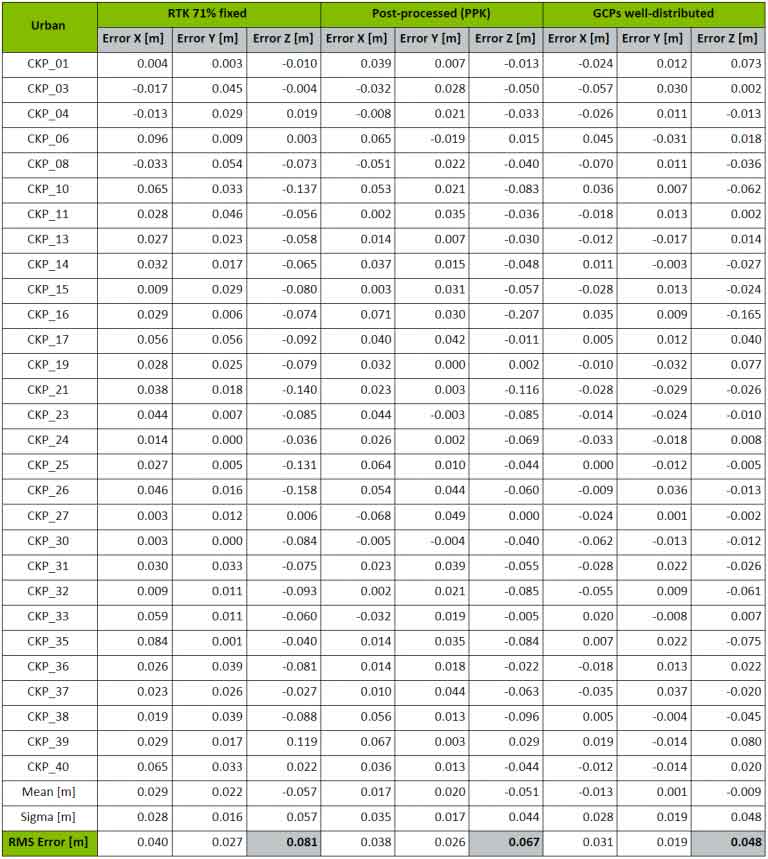
Aus den Ergebnissen wurde deutlich, dass der RTK-Flug klar im Nachteil ist, wenn die Verbindung aufgrund der baulichen Gegebenheiten gestört wird. In diesen Fällen kann das Ergebnis aber durch PPK verbessert werden. Zwar wird damit nicht unbedingt die Präzision der GCPs erreicht, aber wir waren bei unserem Test nicht weit davon entfernt.
Beim RTK-Flug traten in größerer Nähe der RTK-Float-Kamerapositionen größere Fehler auf, während die Fehler nach dem Post-Processing (der Nachbearbeitung) gleichmäßiger verteilt waren.
Das richtige Handwerkszeug
Sind die Datenverbindungen bei Feldern oder anderem Gelände (ob eben oder sehr hügelig) stabil und werden nicht durch Gebäude und ähnliches abgeschirmt, kann ein RTK-Flug auch ohne GCPs sehr präzise Ergebnisse liefern.
Die Kartierung mit einer RTK-/PPK-Drohne ist besonders bei dichtem Bewuchs, Getreide oder bei im Bildmaterial schwer abzugleichenden Landschaftsmerkmalen sinnvoll. So wird eine gleichbleibend hohe Präzision sichergestellt, ganz gleich, wo (oder ob) Sie GCPs platzieren.


In bebauten Gebieten kann es sein, dass die Datenverbindung durch Abschirmung gestört wird, was zu einer ungleichmäßigen Verteilung der RTK-Float-Kamerapositionen führt und eine Verbesserung der Präzision insgesamt erschwert. In unserem Fall liefert PPK bessere Ergebnisse als der RTK-Flug, allerdings werden beide noch durch den Flug mit ausreichend verteilten GCPs übertroffen.
Die Ausgabequalität beider Lösungen haben wir nun gesehen, aber es gibt noch weitere Auswahlkriterien, die zu berücksichtigen sind: praktische Umsetzbarkeit, Zeitaufwand, Kosten und Ihr Standort.
Denn eine Messung der Bodenpasspunkte ist nicht überall machbar – eventuell ist das Gelände instabil oder unerreichbar oder andere Sicherheitsbedenken verhindern die Platzierung von GCPs. Auch kann die Planung und Messung von GCPs durchaus mehrere Stunden in Anspruch nehmen, während die Nachbearbeitung normalerweise nur 10 bis 20 Minuten dauert. Und der Kostenfaktor? Die Kosten für die GCP-Messung fallen bei jedem Projekt erneut an, während der Kauf einer RTK-/PPK-Drohne eine einmalige Investition ist. Langfristig könnte sich also eine RTK-/PPK-Drohne als wirtschaftlicher erweisen.
Sind Sie zum Kauf einer RTK-/PPK-Drohne bereit? Falls Sie sich tatsächlich für eine RTK-/PPK-Lösung entscheiden, vergewissern Sie sich als Erstes, dass Sie Zugriff auf das Basisstationen- oder VRS-Netzwerk vor Ort haben. Anderenfalls müssten Sie doch noch Ihre eigenen Basisstationen vermessen!
Ein besonderes Dankeschön
Besonderer Dank gilt allen, die entweder mit ihren Geräten oder ihrer Zeit zum Test beigetragen haben
| senseFly | drone ebee Plus |
| EPFL TOPO lab | Javad Triumph RTK |
| Datenerfassung | Dai Shi, Lisa Chen |


