The new version of PIX4Dcatch, with improved GeoFusion
Pix4D embarked on a survey to test the new, improved version of PIX4Dcatch, specifically the accuracy of the new algorithm GeoFusion in urban canyons. The Pix4D team has been working on a solution to improve overall project accuracy in these difficult places by developing an in-house algorithm. This algorithm is intended to improve image geotagging accuracy by combining the RTK data coming from an RTK device and mobile phone sensors in order to achieve the best possible accuracy throughout a given project.
They wanted to test whether, when images are collected in weak areas of mobile network connectivity or with deteriorated satellite signal quality, GeoFusion would improve the accuracy of the results. The team tested PIX4Dcatch in a controlled environment and manually controlled the quality of the GNSS signal.
About PIX4Dcatch
They used the iPhone 12 Pro Max, which is equipped with a LiDAR scanner. First, they downloaded the PIX4Dcatch app, which is free from the app store, and then registered with Pix4D. They added an RTK device to their phone in order to achieve survey-grade accuracy then they connected to PIX4Dcatch and were ready to start collecting data.
Images through PIX4Dcatch are automatically captured when moving through a surveying area. The images and LiDAR are triggered based on distance (say every 20cm or so) or on the overlap of images. Once all the images are collected, the position, accuracy, and orientation are optimized by GeoFusion - and then stored in the metadata of the images. The GeoFusion algorithm is run automatically behind every project and uses the available information about position and orientation, as well as information from the RTK device.
RTK accuracy in urban canyons with Pix4D
The phone is equipped with modern sensors and algorithms to track orientation and position while moving. Albeit being very precise in the short term, measurements coming from these sensors tend to drift significantly over longer distances. On the other hand, the RTK-derived positions bring accurate absolute positions provided that the satellite signal quality is good. The question the team set out to answer is, does the phone's accurate short-range tracking counterbalance potential RTK inaccuracies thanks to the GeoFusion algorithm? If the answer is yes, then Pix4D has a simple solution for accurate mapping in urban canyons.
The experiment
For the experiment, they used an urban test field where satellite visibility would not be interfered with by large buildings so that the control would not be interfered with by actual urban canyons, which they would replicate for the experiment. Ground control points were set up and measured with a professional survey-grade RTK device.
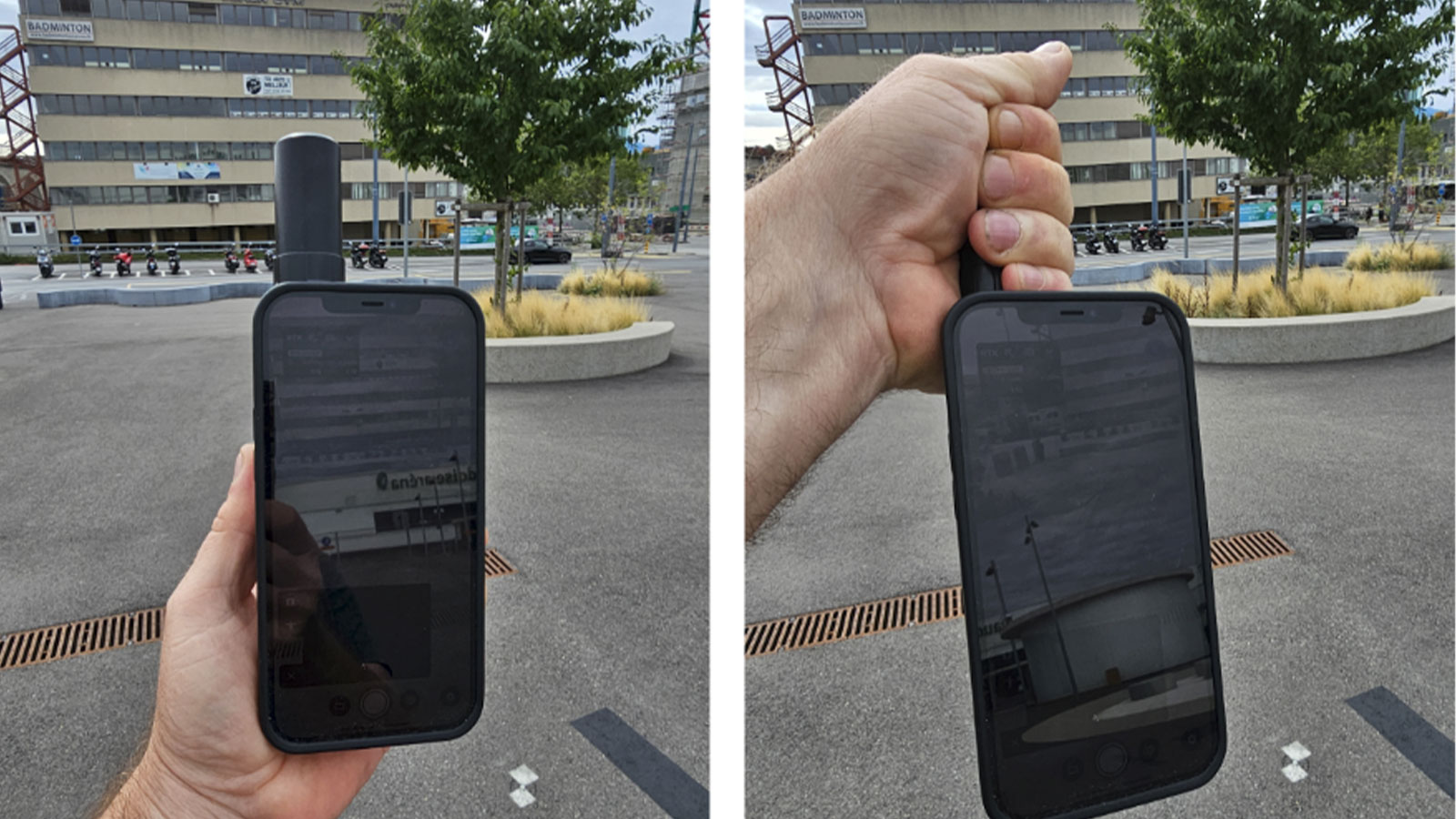
In order to simulate the possible effects of an urban canyon, they obstructed the antenna during data acquisition, which caused a temporary blockage of the GNSS signal which resulted in a loss of the RTK-fix. Now they could test whether the project will suffer from deteriorated accuracy or if the GeoFusion algorithm manages to compensate for the temporary GNSS signal loss. They collected separate data sets, one on the reference and one where they were covering the antenna - the urban canyon simulation.

The experiment results before photogrammetric processing
The preprocessing of image geotags is carried out fully automatically by PIX4Dcatch employing the GeoFusion algorithm. As a result, each image has its proper position and orientation tags written in the EXIF metadata. Checkpoints can be imported and marked in images in PIX4Dmatic even before photogrammetric processing.
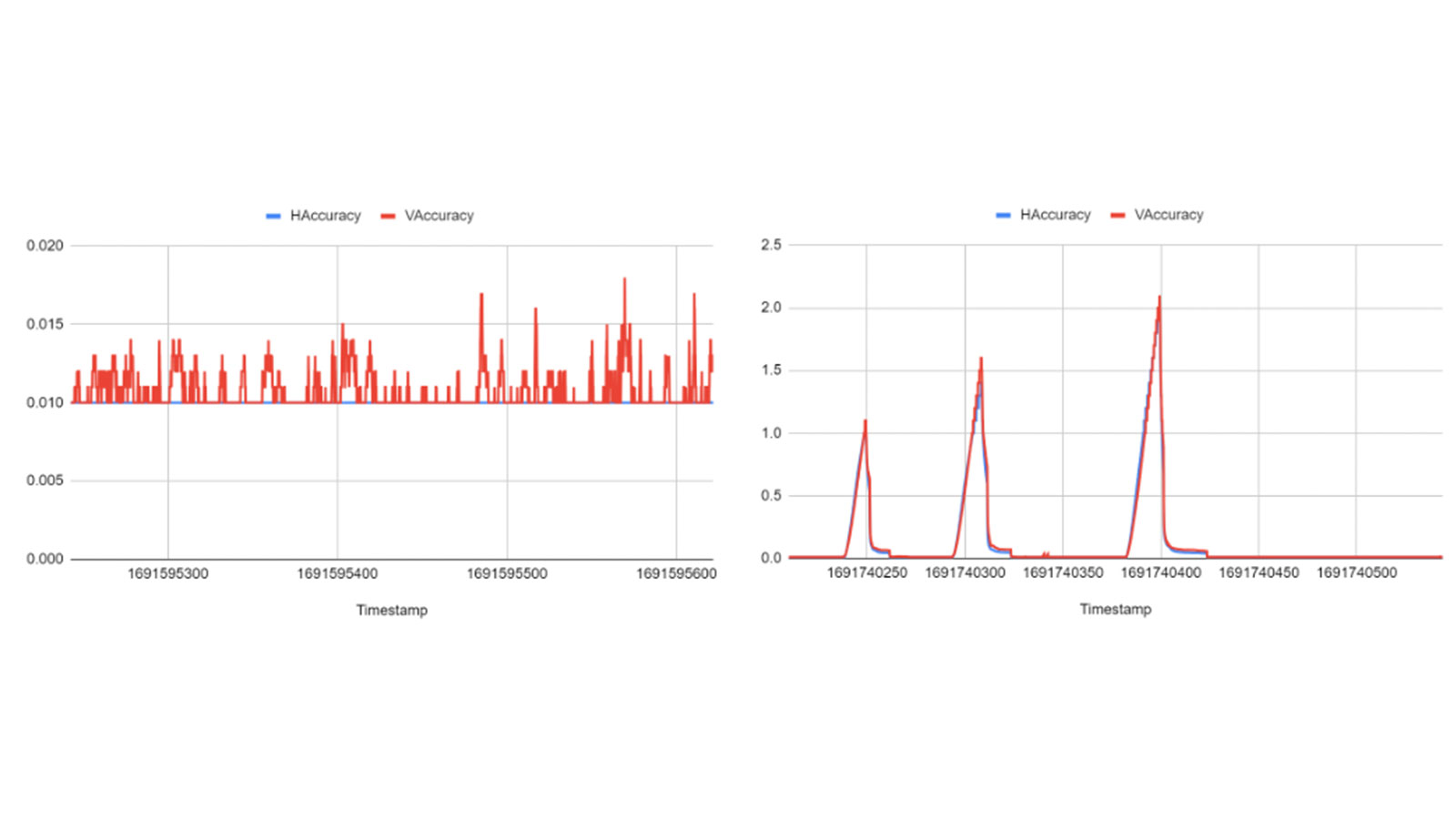
For the experiment, different datasets were collected, one for the control with optimal signal quality and the other where they occasionally covered the RTK device. The two plots below show the effects of the GNSS signal loss on the accuracy of the camera positions as derived by the RTK device. After the automatic data treatment in the GeoFusion algorithm, these spikes have been removed as seen in the image.
We know that the accurate mapping results is the of utmost importance to our users, that’s why we assessed the final accuracy. In the table below you can see the XYZ error (a way to assess the accuracy) between the checkpoints. Note, that for the triangulation, PIX4Dmatic uses the camera internals, as well as the positions and orientations obtained from the EXIF data and written by PIX4Dcatch, after running the GeoFusion algorithm on the mobile device. This is a process that does not require any photogrammetric processing. PIX4Dmatic is only used to manage the checkpoints, coordinate system, and the triangulation of image marks.

Without photogrammetry processing the RMS error for the dataset with access to the RTK signal is about 5cm on the seven checkpoints. When the device is covered and the RTK-fix is lost then the RMS error is 15cm. These results help us to understand the potential of the GeoFusion algorithm, which runs near real-time on the mobile phone. This means that PIX4Dcatch can be used for many more augmented reality applications where there is a need for accurate real-time position and orientation data.
Processing in PIX4Dmatic
After finishing the calibration step into PIX4Dmatic, the RMS error of the checkpoints can be seen in Table 2 below. Table 2 shows the RMS error after the block adjustment. The RMS error from the 7 control points decreases with the additional information from the photogrammetric calculations. If we compare Table 1 and Table 2, there is a strong improvement in the average RMS error for “Dataset 2” (the one with the hidden antenna).
Dataset 1 already has good accuracy because the GeoFusion algorithm ran with an GNSS signal quality. The improvement between Dataset 2 is less than Dataset 1 after the bundle adjustment, but still substantial. Inaccurate RTK positions have more influence here, so the photogrammetric corrections add relatively more value to the overall accuracy.

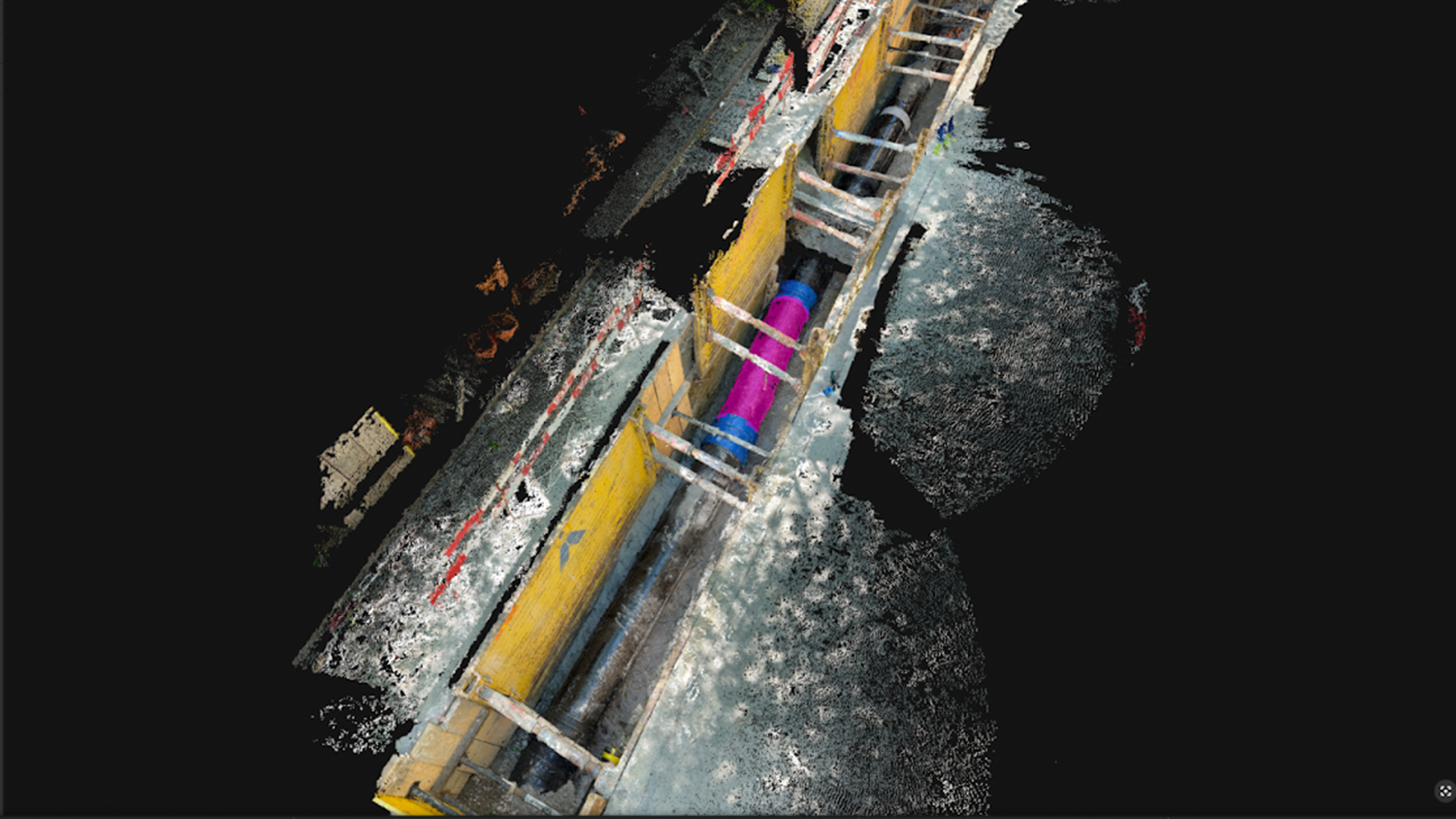
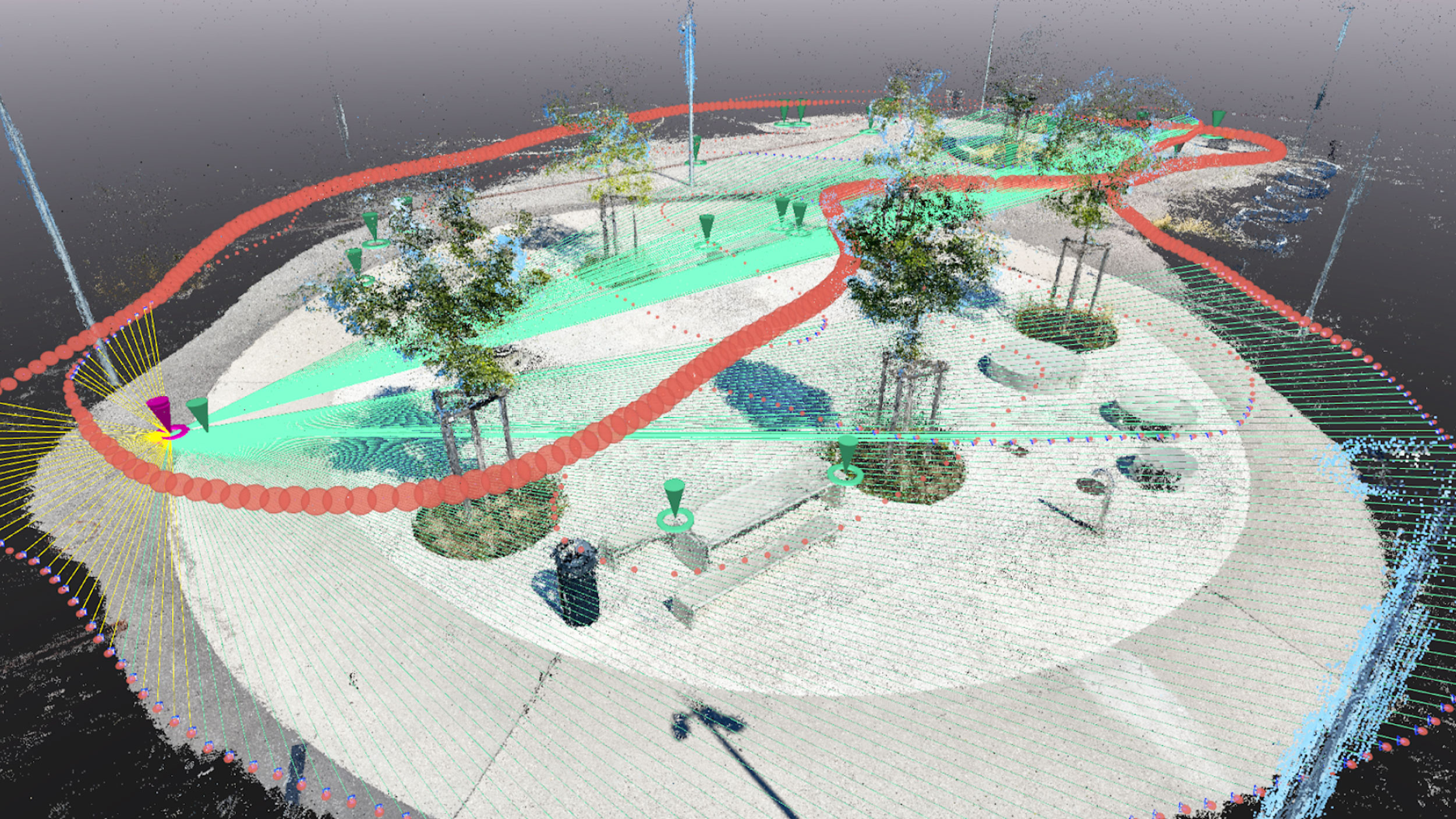
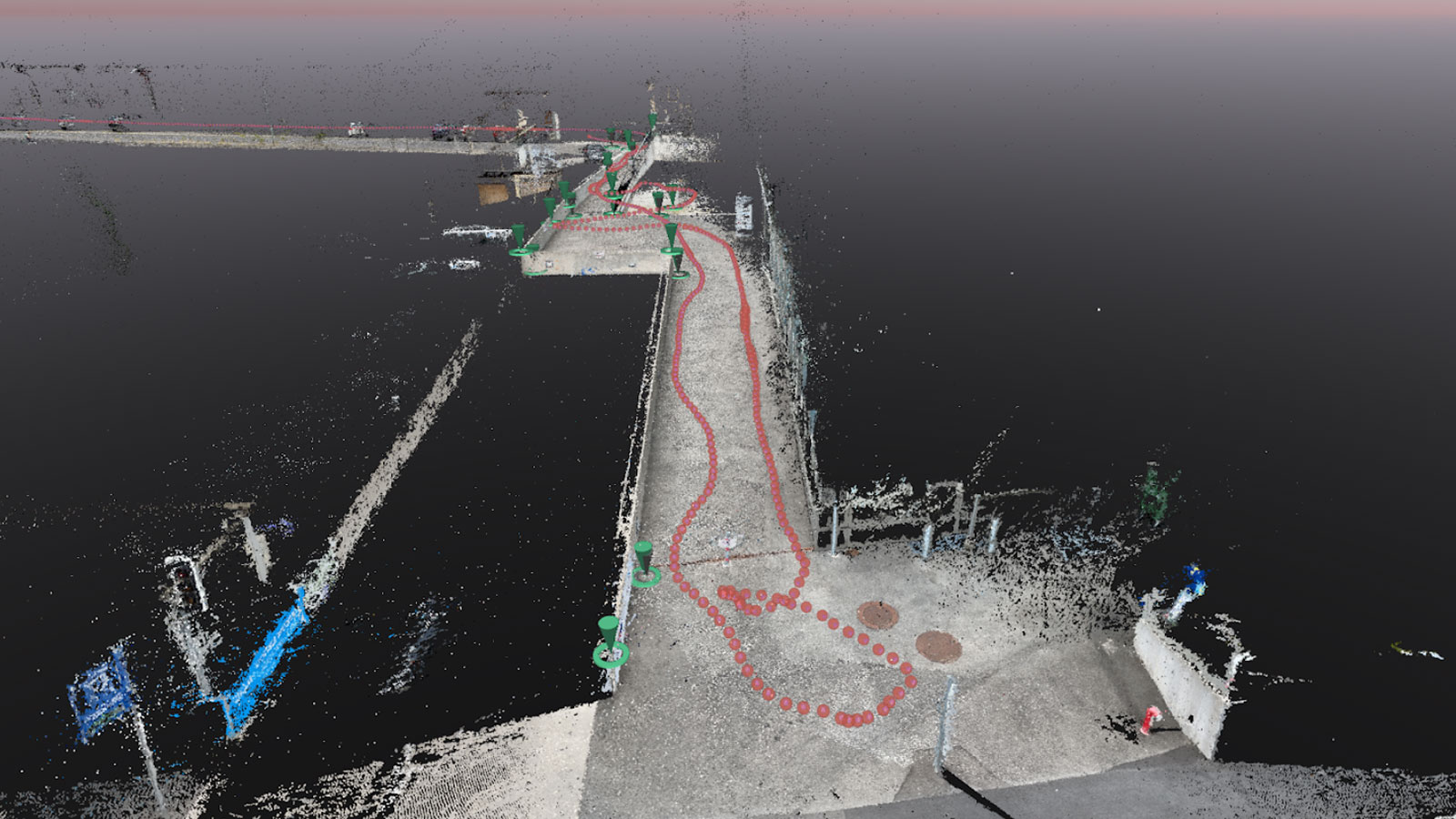
The dense points cloud (combining the iPhone LiDAR and images-based photogrammetry for both datasets) is seen below.
After processing in PIX4Dmatic, the team obtained an RMS error for the checkpoints in the range of 1-4cm for both datasets. Importantly, there was not a significant difference between both datasets in Table 2, even though Dataset 2 was captured close to buildings, and not all image locations have a good RTK accuracy.
The results of the experiment showed that PIX4Dcatch’s new GeoFusion algorithm integrates the information from the GNSS signals of the RTK device and the sensors available inside the mobile phone, thereby improving accuracy. This is especially relevant when some images are collected in weak areas, without or with less accurate GNSS observations. The experiment showed that by employing photogrammetry, Pix4D’s GeoFusion algorithm has automated this traditional task, saving time and money in the instance of urban canyons.