Diving into underwater photogrammetry
In this article, we discuss a new approach to underwater photogrammetry. Mapping from images underwater is extremely difficult due to inconsistent lighting conditions and the change of refractive index, plus color loss due to the limited penetration distance of certain wavelengths.
Underwater Applications
In recent years, photogrammetry has extended from aerial to terrestrial, and now it's extended underwater.
Using photogrammetry under water is still in an exploratory phase, but the need for accurate, up to date underwater maps and models already exists for certain industries, such as environmental monitoring, archaeology, forensics, and infrastructure inspection.
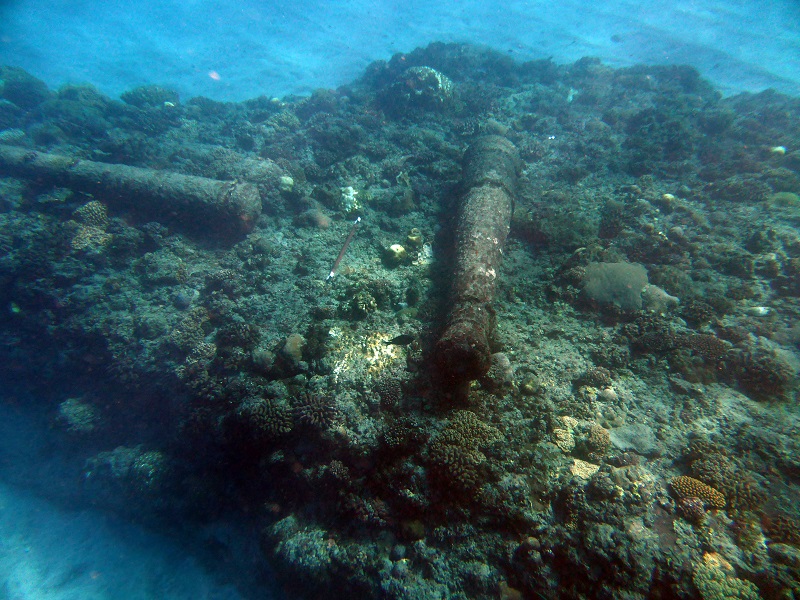
With a measurable 3D model or 2D map of a large area, ship or plane wrecks can be documented for scene reconstruction; bridge piers can be inspected for maintenance and repair; ancient cultural artifacts can be mapped and archived for further research; regions can be repetitively monitored for detecting environmental change and more.
A new process: distance-based image acquisition
A common practise in many underwater projects is triggering images by time-lapse from a camera moving above or around the object of interest. However, this creates a lot of problems in post-processing as, unlike on the surface, moving speed underwater cannot be estimated precisely. If the images are time-based, divers will take too many images while swimming against the current and not enough images when moving with it.
Such inconsistent image overlap either requires a lot of manual work to remove unnecessary images or risks messing up the calibration due to short baselines or disconnection of adjacent images.
The new acquisition method, developed by Geolab, requires a team of professional divers. For their offshore projects there were at least four professional divers (including one boat operator and one or two photographers) along with a project coordinator. Each of the team members playing an important role in the image acquisition process.
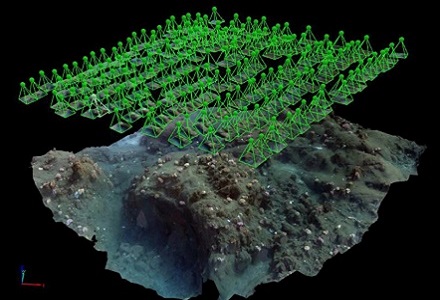
The process allows the divers to know the exact position each image has to be taken at instead of taking images randomly based on time-lapse. The divers manually trigger the camera at specific spots based on the distance to the object and to the previous images. This results in a much more regular image acquisition plans, easier and more precise 3D reconstruction while optimizing the precious time spent underwater.
However, mapping underwater is still a lot trickier than doing the same on land. Light does not travel through water the same way as through air, due to different light refraction rates. On top of this, small particles suspended in water can dramatically affect visibility under water. The divers need to know the basics of photogrammetry and to adapt the acquisition procedure underwater depending on the visibility conditions they witness on the spot.
Better accuracy in underwater mapping
For mapping professionals and surveyors, accuracy is essential.
At the time of writing, a majority of underwater mapping projects are still experiments. While images can be aquired, it may be a struggle to accurately reconstruct an accurate 3D scene or 2D map. Since an optimal way to capture images for mapping has been developed, the next step is to ensure the 3D reconstruction was accurate and to be able to geolocate their projects in reference to a global coordinate system.
Here's how the team with Geolab tackled the issue:
Accurate measurements for accurate maps
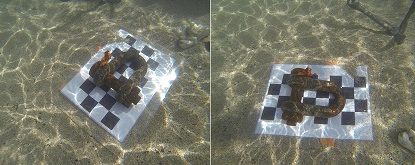
Having ensured Pix4Dmapper can correctly calibrate the camera, it is important to scale projects to their true dimensions. Based upon a common scaling method used in Pix4Dmapper’s rayCloud, rulers or customized scale bars were placed in the mapping area and their measurement was assigned in Pix4Dmapper to scale the entire project.
These scaling tools should be as long as is practical and placed perpendicular to each other to decrease the relative length error and the possible error in one direction. To verify the 3D reconstruction is precise, extra scale bars can be placed on site. They can be used to assess the software-computed measurements after the scaling step, to match their actual dimensions. This verification can ensure accuracy of any 2D or 3D measurement in the project, which is essential for any mapping work. One can easily understand the need for accurate shipwreck size, area of coral reef coverage, length of cracks on a bridge pier, and so on.

Underwater ground control points
Similar to aerial mapping practices, some metal tags were also placed on site, well distributed over the surveyed area. While they are not compulsory, they help the software to find and match identical points in different images and can be used as Ground Control Points (GCPs) for georeferencing the project with a specific underwater and on-board the boat procedure, not detailed here.

In deep water: visual limitations
In shallow water, say less than three meters deep, a common issue is the change of light patterns illuminating the mapped area between images. This can happen when the direct rays of sunlight hit the surface of water. Surface waves create numerous concave and convex lenses which reflect and refract the light in a very complex and unpredictable way. The content of images depicting the same object can be very different from one picture to another, resulting in difficult photogrammetry processing.
This explains why for underwater mapping projects, the ones in shallow water regions can be extremely difficult.
However, going deeper does not necessarily mean getting away from light problems. When light travels in water, it is absorbed, refracted, or reflected, and each wavelength behaves differently, leading to different traveling distance underwater.
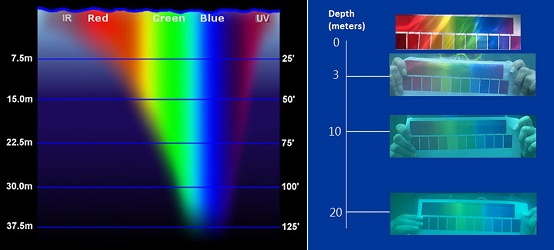
The following chart demonstrates the theoretical distance light penetrates underwater according to its wavelength, and the associated loss of color. We can see that the underwater environment gets darker in proportion to the distance from the surface. Even though the short wavelengths possess greater energy and penetrate further, they are still refracted and absorbed. Past a depth of 40 meters, only blue light is visible and the loss of light is rapid.
Color or quality?
For projects performed in depths between 5 and 25 meters underwater, images with sufficient light could be captured by setting higher ISO values and increasing the exposure time: however, this sacrificed image quality. This is unfortunately very common for underwater mapping and more widely for underwater photography. To mitigate this or if the projects go beyond 30 to 40 meters, artificial lighting would be needed - but ensuring uniform lighting over the mapped area would be another challenge to deal with.
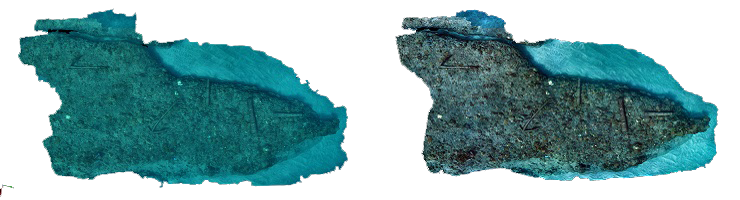
As all the wavelengths of light do not penetrate equally in water, the visual impact on the captured images is strong. At medium depth, filters can be placed in front of the camera to help capture more of specific wavelengths, but at lower depths some colors are no longer present and the only way to bring them back is again by introducing artificial light.The captured images can nevertheless be color corrected in an image editing software before the photogrammetry process. To some extent, this can help to restore more natural colors while keeping the continuity of color intensity. This is not a mandatory step, since the original images can also give accurate results using Pix4D’s software, however, it gives a more visually-pleasing outcome, which can be very useful for some applications such as coral reef monitoring.
Going deeper
Thanks to Pix4D’s photogrammetry software and Geolab’s data acquisition techniques, accurate underwater mapping is now possible, even though both companies are still advancing the technology. In the near future, Geolab plans to upgrade their camera setup and ultimately adapt their acquisition method to remotely operated vehicles (ROVs), while Pix4D will improve its current workflow for processing underwater images.
With the pre-calibrated Pix4D camera database, Pix4Dmapper is capable of reconstructing 3D from images with a very short processing time. Another technique that also produces great results, is underwater videogrammetry.
However, since the key camera interiors-focal length changes significantly under water, which breaks the assumptions for general aerial and terrestrial mapping cases, more adaptable processing options will be needed. Pix4D and Geolab will collaborate on future projects and assist each other’s progress, extending the advancement beneath the water surface.